Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Part Boundaries from 3D Point Clouds
Paper and Code

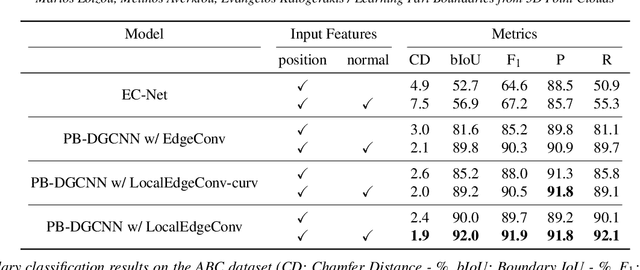
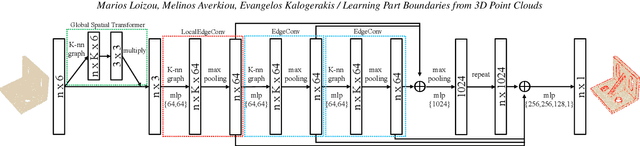

We present a method that detects boundaries of parts in 3D shapes represented as point clouds. Our method is based on a graph convolutional network architecture that outputs a probability for a point to lie in an area that separates two or more parts in a 3D shape. Our boundary detector is quite generic: it can be trained to localize boundaries of semantic parts or geometric primitives commonly used in 3D modeling. Our experiments demonstrate that our method can extract more accurate boundaries that are closer to ground-truth ones compared to alternatives. We also demonstrate an application of our network to fine-grained semantic shape segmentation, where we also show improvements in terms of part labeling performance.
* Appeared in Eurographics Symposium on Geometry Processing 2020
View paper on