 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Occlusion-Aware Coarse-to-Fine Depth Map for Self-supervised Monocular Depth Estimation
Paper and Code
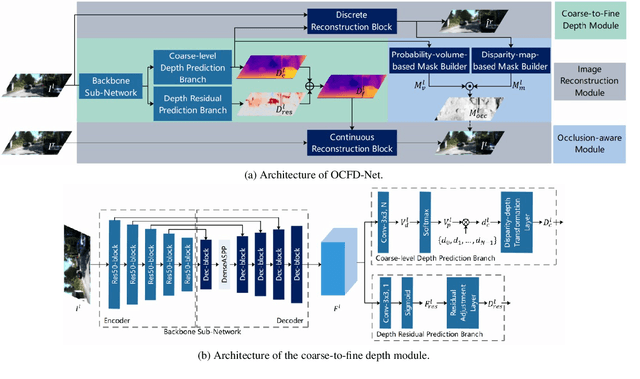
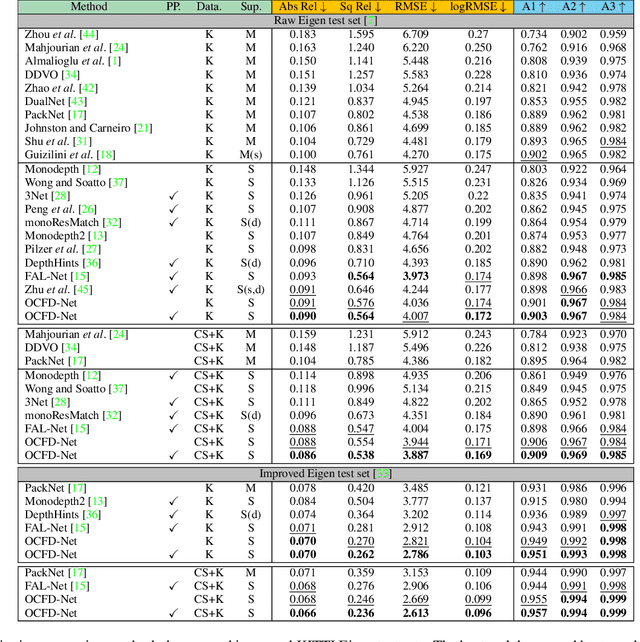
Self-supervised monocular depth estimation, aiming to learn scene depths from single images in a self-supervised manner, has received much attention recently. In spite of recent efforts in this field, how to learn accurate scene depths and alleviate the negative influence of occlusions for self-supervised depth estimation, still remains an open problem. Addressing this problem, we firstly empirically analyze the effects of both the continuous and discrete depth constraints which are widely used in the training process of many existing works. Then inspired by the above empirical analysis, we propose a novel network to learn an Occlusion-aware Coarse-to-Fine Depth map for self-supervised monocular depth estimation, called OCFD-Net. Given an arbitrary training set of stereo image pairs, the proposed OCFD-Net does not only employ a discrete depth constraint for learning a coarse-level depth map, but also employ a continuous depth constraint for learning a scene depth residual, resulting in a fine-level depth map. In addition, an occlusion-aware module is designed under the proposed OCFD-Net, which is able to improve the capability of the learnt fine-level depth map for handling occlusions. Extensive experimental results on the public KITTI and Make3D datasets demonstrate that the proposed method outperforms 20 existing state-of-the-art methods in most cases.