 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Neural-Symbolic Descriptive Planning Models via Cube-Space Priors: The Voyage Home (to STRIPS)
Paper and Code
Apr 27, 2020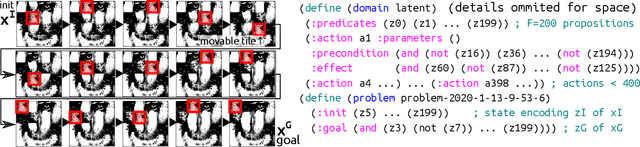



We achieved a new milestone in the difficult task of enabling agents to learn about their environment autonomously. Our neuro-symbolic architecture is trained end-to-end to produce a succinct and effective discrete state transition model from images alone. Our target representation (the Planning Domain Definition Language) is already in a form that off-the-shelf solvers can consume, and opens the door to the rich array of modern heuristic search capabilities. We demonstrate how the sophisticated innate prior we place on the learning process significantly reduces the complexity of the learned representation, and reveals a connection to the graph-theoretic notion of "cube-like graphs", thus opening the door to a deeper understanding of the ideal properties for learned symbolic representations. We show that the powerful domain-independent heuristics allow our system to solve visual 15-Puzzle instances which are beyond the reach of blind search, without resorting to the Reinforcement Learning approach that requires a huge amount of training on the domain-dependent reward information.