 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Neural Implicit Functions as Object Representations for Robotic Manipulation
Paper and Code
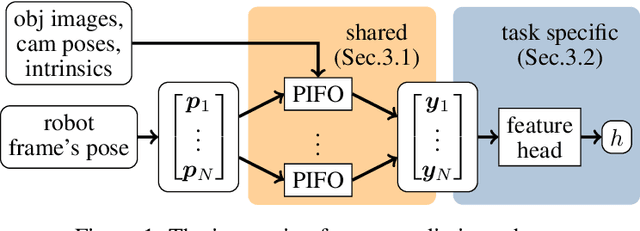
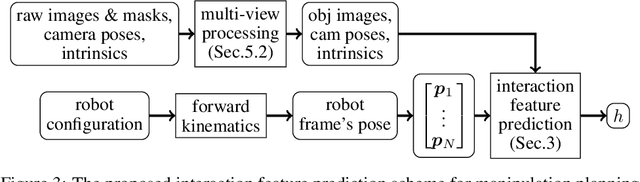
Robotic manipulation planning is the problem of finding a sequence of robot configurations that involves interactions with objects in the scene, e.g., grasp, placement, tool-use, etc. To achieve such interactions, traditional approaches require hand-designed features and object representations, and it still remains an open question how to describe such interactions with arbitrary objects in a flexible and efficient way. Inspired by recent advances in 3D modeling, e.g. NeRF, we propose a method to represent objects as neural implicit functions upon which we can define and jointly train interaction constraint functions. The proposed pixel-aligned representation is directly inferred from camera images with known camera geometry, naturally acting as a perception component in the whole manipulation pipeline, while at the same time enabling sequential robot manipulation planning.