 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Models for Shared Control of Human-Machine Systems with Unknown Dynamics
Paper and Code

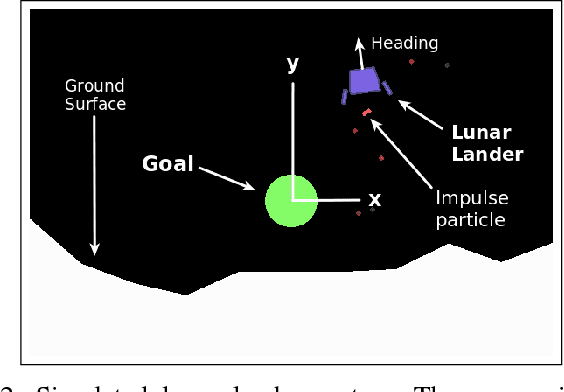
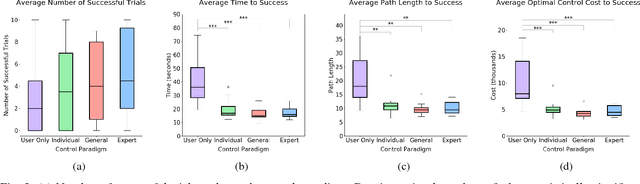
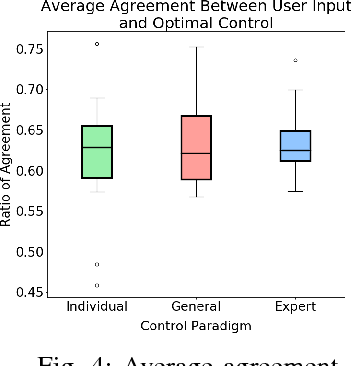
We present a novel approach to shared control of human-machine systems. Our method assumes no a priori knowledge of the system dynamics. Instead, we learn both the dynamics and information about the user's interaction from observation through the use of the Koopman operator. Using the learned model, we define an optimization problem to compute the optimal policy for a given task, and compare the user input to the optimal input. We demonstrate the efficacy of our approach with a user study. We also analyze the individual nature of the learned models by comparing the effectiveness of our approach when the demonstration data comes from a user's own interactions, from the interactions of a group of users and from a domain expert. Positive results include statistically significant improvements on task metrics when comparing a user-only control paradigm with our shared control paradigm. Surprising results include findings that suggest that individualizing the model based on a user's own data does not effect the ability to learn a useful dynamic system. We explore this tension as it relates to developing human-in-the-loop systems further in the discussion.