 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Humanoid Robot Running Skills through Proximal Policy Optimization
Paper and Code
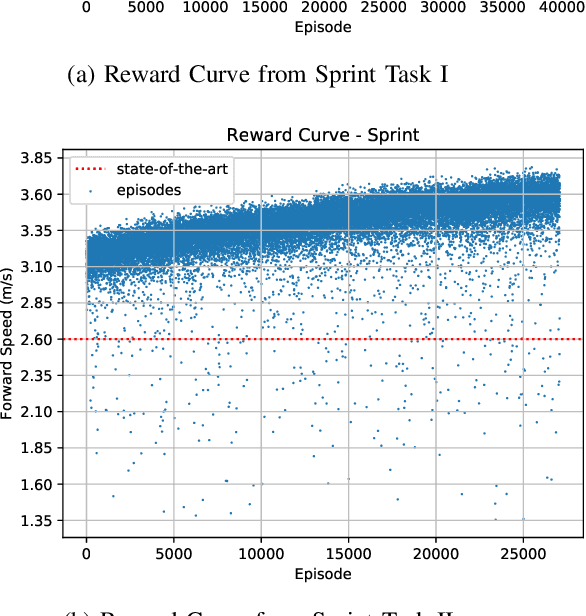
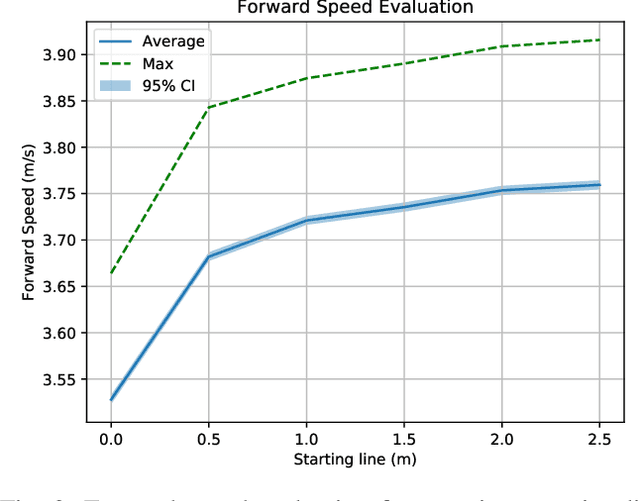
In the current level of evolution of Soccer 3D, motion control is a key factor in team's performance. Recent works takes advantages of model-free approaches based on Machine Learning to exploit robot dynamics in order to obtain faster locomotion skills, achieving running policies and, therefore, opening a new research direction in the Soccer 3D environment. In this work, we present a methodology based on Deep Reinforcement Learning that learns running skills without any prior knowledge, using a neural network whose inputs are related to robot's dynamics. Our results outperformed the previous state-of-the-art sprint velocity reported in Soccer 3D literature by a significant margin. It also demonstrated improvement in sample efficiency, being able to learn how to run in just few hours. We reported our results analyzing the training procedure and also evaluating the policies in terms of speed, reliability and human similarity. Finally, we presented key factors that lead us to improve previous results and shared some ideas for future work.