 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Human-Aware Path Planning with Fully Convolutional Networks
Paper and Code
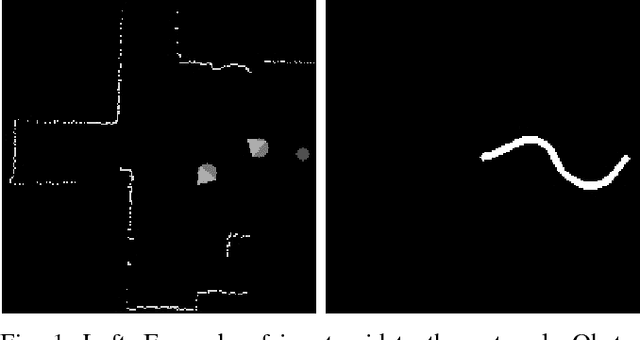
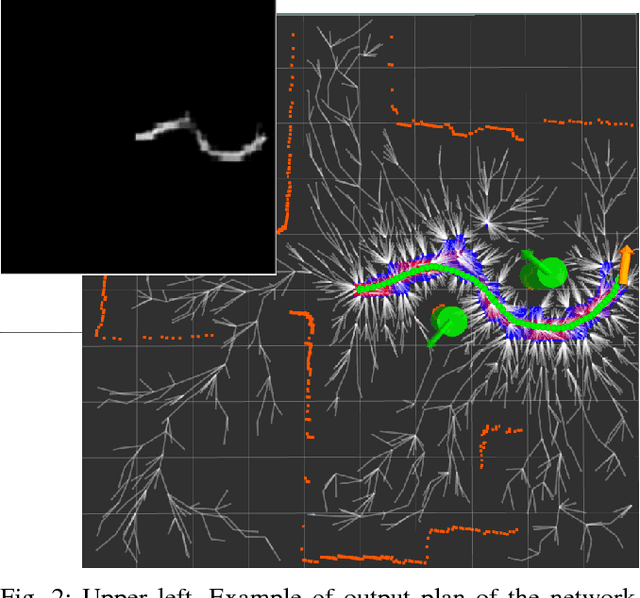
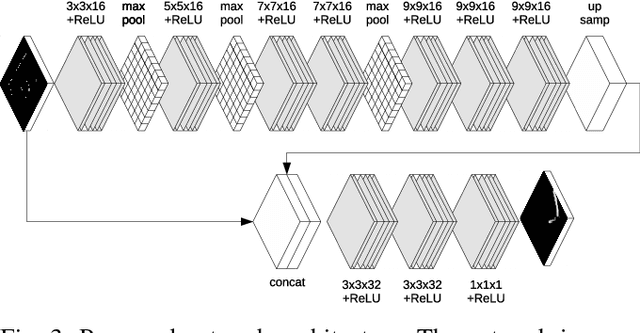
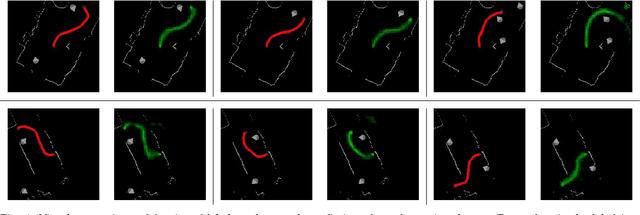
This work presents an approach to learn path planning for robot social navigation by demonstration. We make use of Fully Convolutional Neural Networks (FCNs) to learn from expert's path demonstrations a map that marks a feasible path to the goal as a classification problem. The use of FCNs allows us to overcome the problem of manually designing/identifying the cost-map and relevant features for the task of robot navigation. The method makes use of optimal Rapidly-exploring Random Tree planner (RRT*) to overcome eventual errors in the path prediction; the FCNs prediction is used as cost-map and also to partially bias the sampling of the configuration space, leading the planner to behave similarly to the learned expert behavior. The approach is evaluated in experiments with real trajectories and compared with Inverse Reinforcement Learning algorithms that use RRT* as underlying planner.