 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Graph-Structured Sum-Product Networks for Probabilistic Semantic Maps
Paper and Code
Nov 22, 2017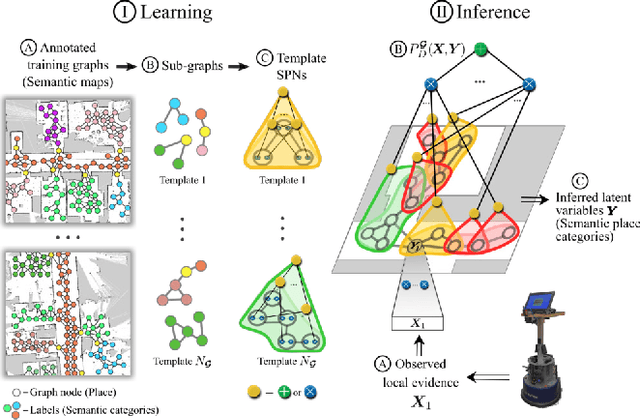
We introduce Graph-Structured Sum-Product Networks (GraphSPNs), a probabilistic approach to structured prediction for problems where dependencies between latent variables are expressed in terms of arbitrary, dynamic graphs. While many approaches to structured prediction place strict constraints on the interactions between inferred variables, many real-world problems can be only characterized using complex graph structures of varying size, often contaminated with noise when obtained from real data. Here, we focus on one such problem in the domain of robotics. We demonstrate how GraphSPNs can be used to bolster inference about semantic, conceptual place descriptions using noisy topological relations discovered by a robot exploring large-scale office spaces. Through experiments, we show that GraphSPNs consistently outperform the traditional approach based on undirected graphical models, successfully disambiguating information in global semantic maps built from uncertain, noisy local evidence. We further exploit the probabilistic nature of the model to infer marginal distributions over semantic descriptions of as yet unexplored places and detect spatial environment configurations that are novel and incongruent with the known evidence.