 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Generalizable Representations for Reinforcement Learning via Adaptive Meta-learner of Behavioral Similarities
Paper and Code



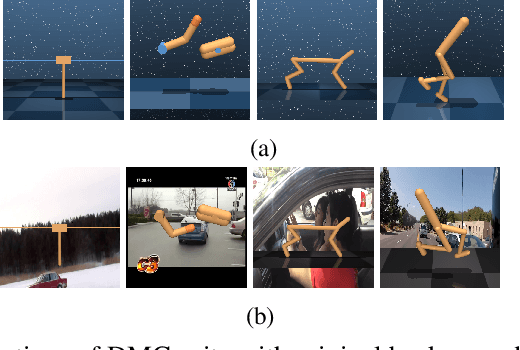
How to learn an effective reinforcement learning-based model for control tasks from high-level visual observations is a practical and challenging problem. A key to solving this problem is to learn low-dimensional state representations from observations, from which an effective policy can be learned. In order to boost the learning of state encoding, recent works are focused on capturing behavioral similarities between state representations or applying data augmentation on visual observations. In this paper, we propose a novel meta-learner-based framework for representation learning regarding behavioral similarities for reinforcement learning. Specifically, our framework encodes the high-dimensional observations into two decomposed embeddings regarding reward and dynamics in a Markov Decision Process (MDP). A pair of meta-learners are developed, one of which quantifies the reward similarity and the other quantifies dynamics similarity over the correspondingly decomposed embeddings. The meta-learners are self-learned to update the state embeddings by approximating two disjoint terms in on-policy bisimulation metric. To incorporate the reward and dynamics terms, we further develop a strategy to adaptively balance their impacts based on different tasks or environments. We empirically demonstrate that our proposed framework outperforms state-of-the-art baselines on several benchmarks, including conventional DM Control Suite, Distracting DM Control Suite and a self-driving task CARLA.