 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning from many trajectories
Paper and Code
Mar 31, 2022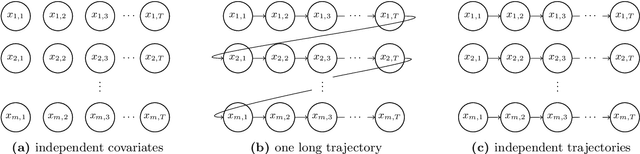
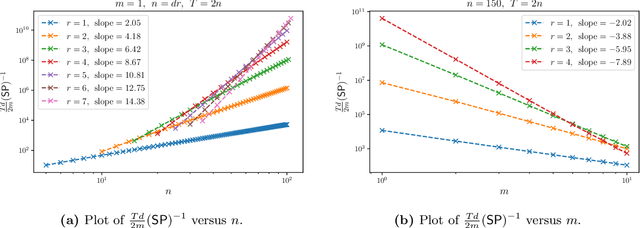
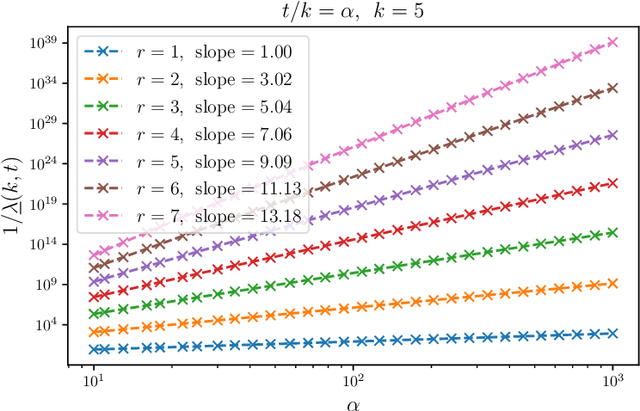
We initiate a study of supervised learning from many independent sequences ("trajectories") of non-independent covariates, reflecting tasks in sequence modeling, control, and reinforcement learning. Conceptually, our multi-trajectory setup sits between two traditional settings in statistical learning theory: learning from independent examples and learning from a single auto-correlated sequence. Our conditions for efficient learning generalize the former setting--trajectories must be non-degenerate in ways that extend standard requirements for independent examples. They do not require that trajectories be ergodic, long, nor strictly stable. For linear least-squares regression, given $n$-dimensional examples produced by $m$ trajectories, each of length $T$, we observe a notable change in statistical efficiency as the number of trajectories increases from a few (namely $m \lesssim n$) to many (namely $m \gtrsim n$). Specifically, we establish that the worst-case error rate this problem is $\Theta(n / m T)$ whenever $m \gtrsim n$. Meanwhile, when $m \lesssim n$, we establish a (sharp) lower bound of $\Omega(n^2 / m^2 T)$ on the worst-case error rate, realized by a simple, marginally unstable linear dynamical system. A key upshot is that, in domains where trajectories regularly reset, the error rate eventually behaves as if all of the examples were independent altogether, drawn from their marginals. As a corollary of our analysis, we also improve guarantees for the linear system identification problem.