 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning from Extrapolated Corrections
Paper and Code
Mar 10, 2019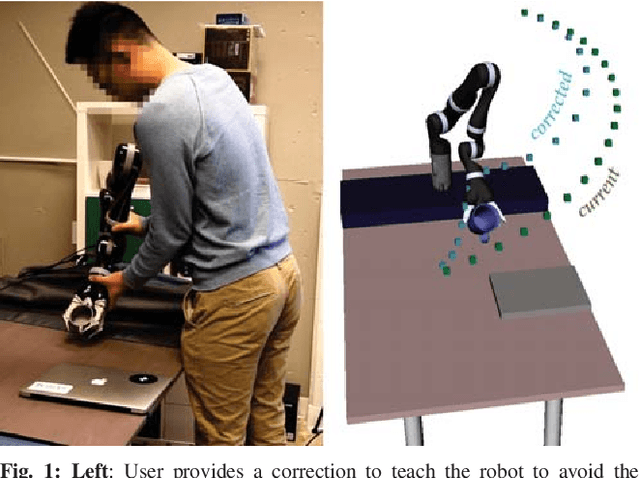
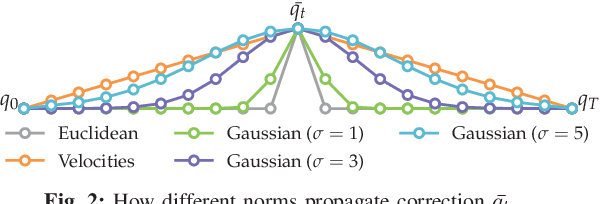

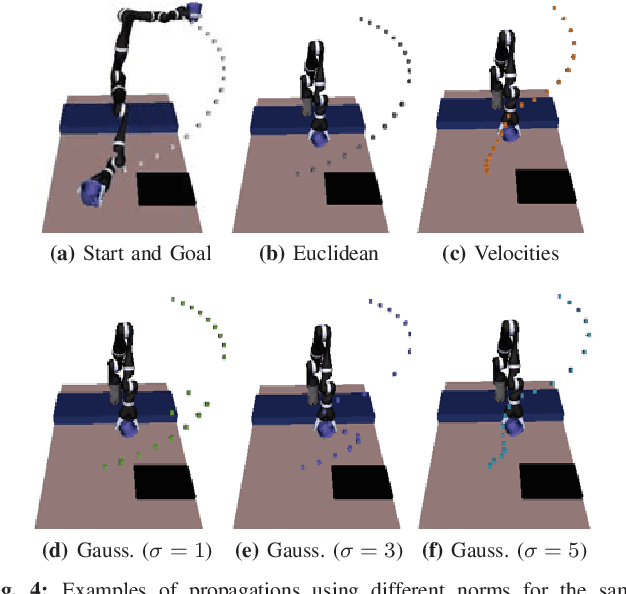
Our goal is to enable robots to learn cost functions from user guidance. Often it is difficult or impossible for users to provide full demonstrations, so corrections have emerged as an easier guidance channel. However, when robots learn cost functions from corrections rather than demonstrations, they have to extrapolate a small amount of information -- the change of a waypoint along the way -- to the rest of the trajectory. We cast this extrapolation problem as online function approximation, which exposes different ways in which the robot can interpret what trajectory the person intended, depending on the function space used for the approximation. Our simulation results and user study suggest that using function spaces with non-Euclidean norms can better capture what users intend, particularly if environments are uncluttered. This, in turn, can lead to the robot learning a more accurate cost function and improves the user's subjective perceptions of the robot.