 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Eco-Driving Strategies at Signalized Intersections
Paper and Code
Apr 26, 2022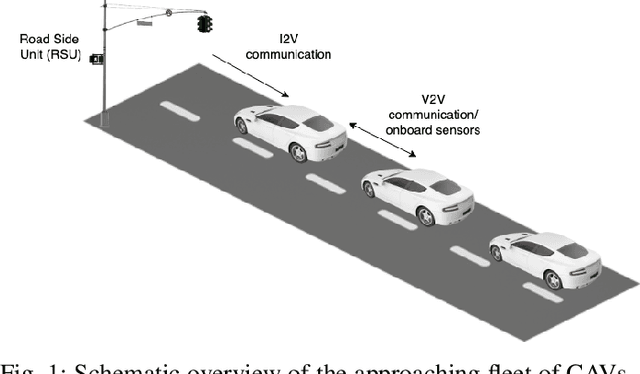
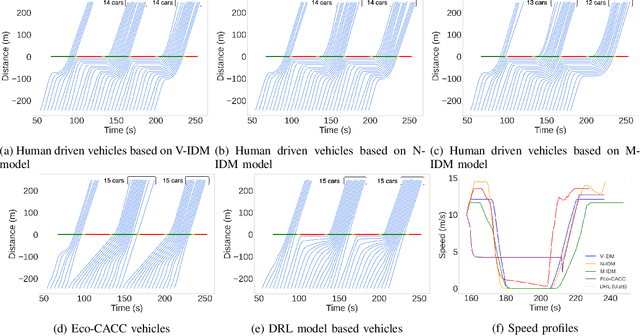
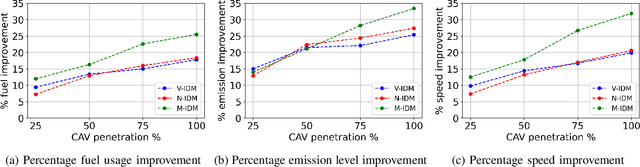
Signalized intersections in arterial roads result in persistent vehicle idling and excess accelerations, contributing to fuel consumption and CO2 emissions. There has thus been a line of work studying eco-driving control strategies to reduce fuel consumption and emission levels at intersections. However, methods to devise effective control strategies across a variety of traffic settings remain elusive. In this paper, we propose a reinforcement learning (RL) approach to learn effective eco-driving control strategies. We analyze the potential impact of a learned strategy on fuel consumption, CO2 emission, and travel time and compare with naturalistic driving and model-based baselines. We further demonstrate the generalizability of the learned policies under mixed traffic scenarios. Simulation results indicate that scenarios with 100% penetration of connected autonomous vehicles (CAV) may yield as high as 18% reduction in fuel consumption and 25% reduction in CO2 emission levels while even improving travel speed by 20%. Furthermore, results indicate that even 25% CAV penetration can bring at least 50% of the total fuel and emission reduction benefits.