 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning dynamics models for velocity estimation in autonomous racing
Paper and Code
Aug 28, 2024
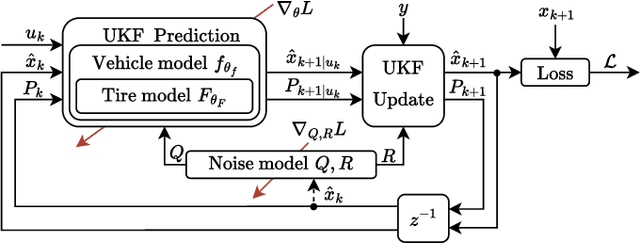
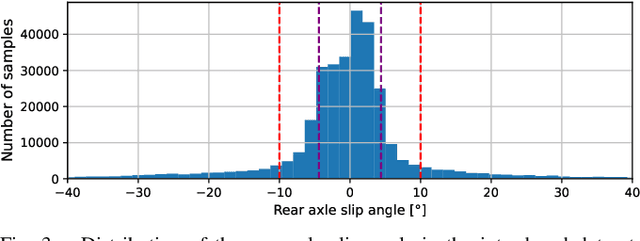
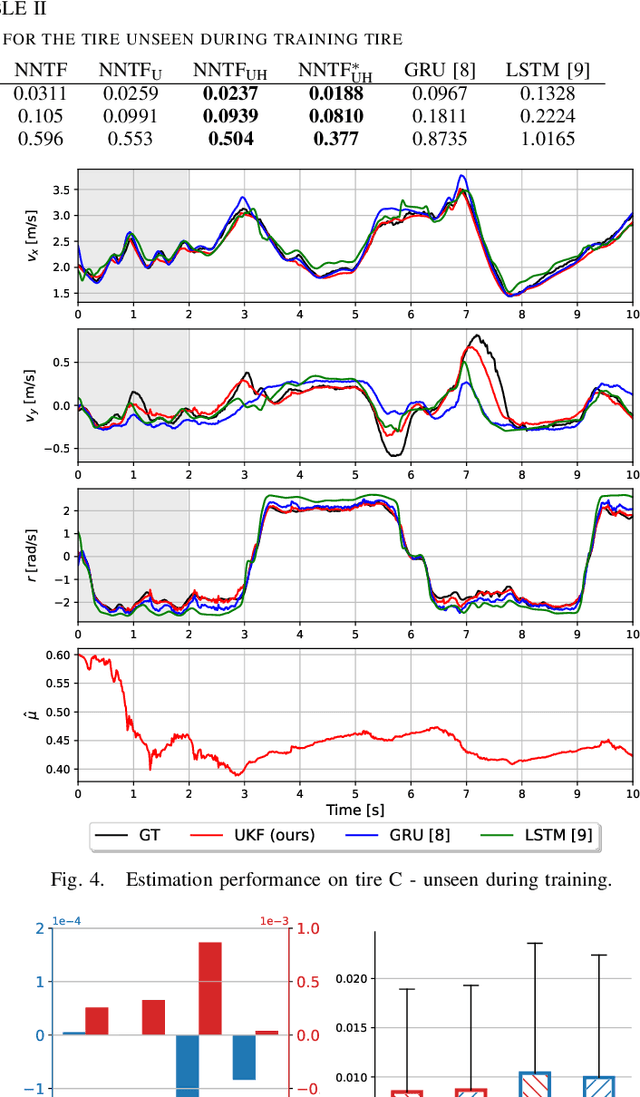
Velocity estimation is of great importance in autonomous racing. Still, existing solutions are characterized by limited accuracy, especially in the case of aggressive driving or poor generalization to unseen road conditions. To address these issues, we propose to utilize Unscented Kalman Filter (UKF) with a learned dynamics model that is optimized directly for the state estimation task. Moreover, we propose to aid this model with the online-estimated friction coefficient, which increases the estimation accuracy and enables zero-shot adaptation to the new road conditions. To evaluate the UKF-based velocity estimator with the proposed dynamics model, we introduced a publicly available dataset of aggressive manoeuvres performed by an F1TENTH car, with sideslip angles reaching 40{\deg}. Using this dataset, we show that learning the dynamics model through UKF leads to improved estimation performance and that the proposed solution outperforms state-of-the-art learning-based state estimators by 17% in the nominal scenario. Moreover, we present unseen zero-shot adaptation abilities of the proposed method to the new road surface thanks to the use of the proposed learning-based tire dynamics model with online friction estimation.