Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning by Cheating : An End-to-End Zero Shot Framework for Autonomous Drone Navigation
Paper and Code
Nov 11, 2021
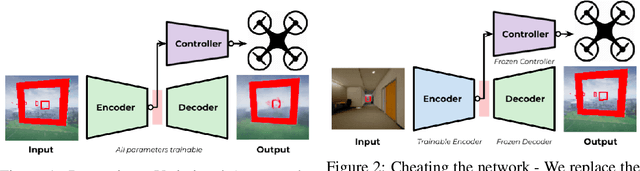
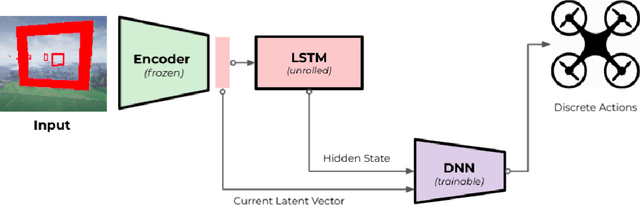

This paper proposes a novel framework for autonomous drone navigation through a cluttered environment. Control policies are learnt in a low-level environment during training and are applied to a complex environment during inference. The controller learnt in the training environment is tricked into believing that the robot is still in the training environment when it is actually navigating in a more complex environment. The framework presented in this paper can be adapted to reuse simple policies in more complex tasks. We also show that the framework can be used as an interpretation tool for reinforcement learning algorithms.
View paper on