 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Bilinear Models of Actuated Koopman Generators from Partially-Observed Trajectories
Paper and Code
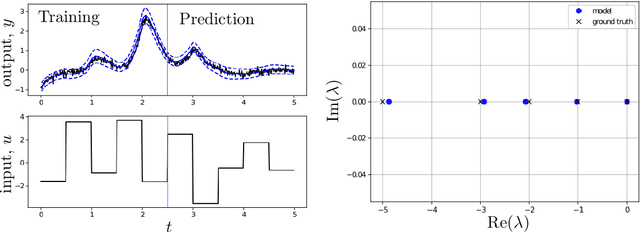
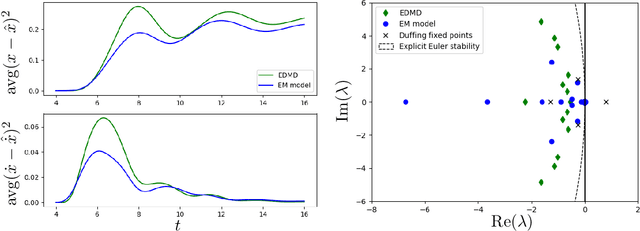
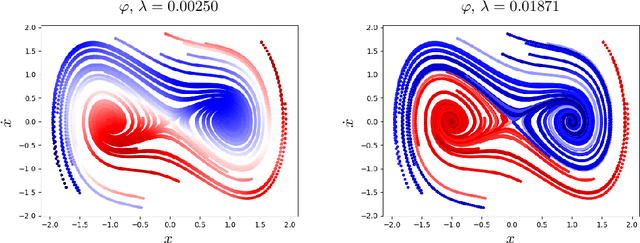
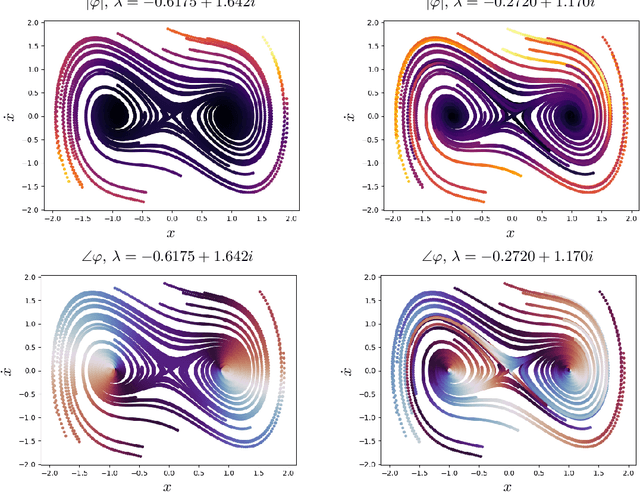
Data-driven models for nonlinear dynamical systems based on approximating the underlying Koopman operator or generator have proven to be successful tools for forecasting, feature learning, state estimation, and control. It has become well known that the Koopman generators for control-affine systems also have affine dependence on the input, leading to convenient finite-dimensional bilinear approximations of the dynamics. Yet there are still two main obstacles that limit the scope of current approaches for approximating the Koopman generators of systems with actuation. First, the performance of existing methods depends heavily on the choice of basis functions over which the Koopman generator is to be approximated; and there is currently no universal way to choose them for systems that are not measure preserving. Secondly, if we do not observe the full state, we may not gain access to a sufficiently rich collection of such functions to describe the dynamics. This is because the commonly used method of forming time-delayed observables fails when there is actuation. To remedy these issues, we write the dynamics of observables governed by the Koopman generator as a bilinear hidden Markov model, and determine the model parameters using the expectation-maximization (EM) algorithm. The E-step involves a standard Kalman filter and smoother, while the M-step resembles control-affine dynamic mode decomposition for the generator. We demonstrate the performance of this method on three examples, including recovery of a finite-dimensional Koopman-invariant subspace for an actuated system with a slow manifold; estimation of Koopman eigenfunctions for the unforced Duffing equation; and model-predictive control of a fluidic pinball system based only on noisy observations of lift and drag.