Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning an internal representation of the end-effector configuration space
Paper and Code
Oct 03, 2018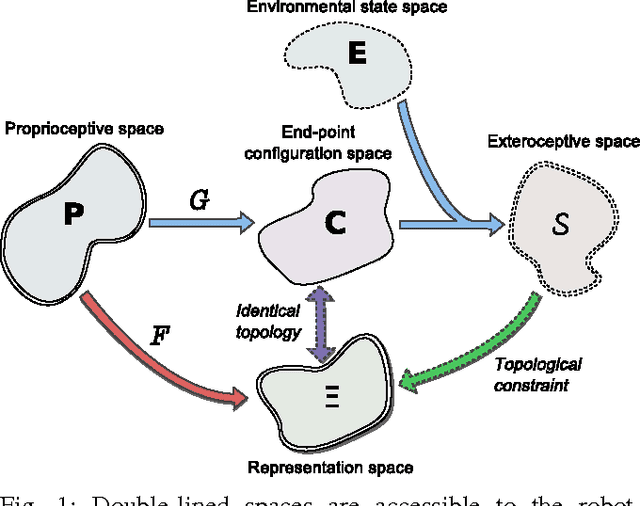
Current machine learning techniques proposed to automatically discover a robot kinematics usually rely on a priori information about the robot's structure, sensors properties or end-effector position. This paper proposes a method to estimate a certain aspect of the forward kinematics model with no such information. An internal representation of the end-effector configuration is generated from unstructured proprioceptive and exteroceptive data flow under very limited assumptions. A mapping from the proprioceptive space to this representational space can then be used to control the robot.
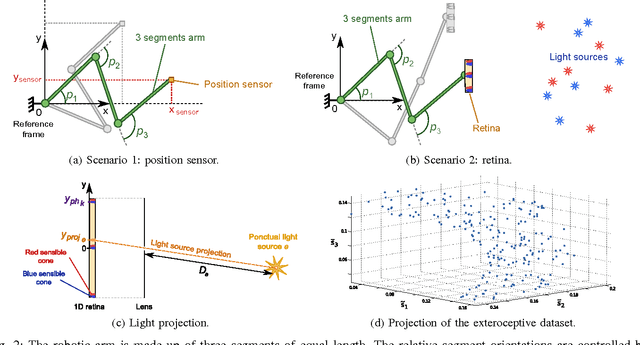
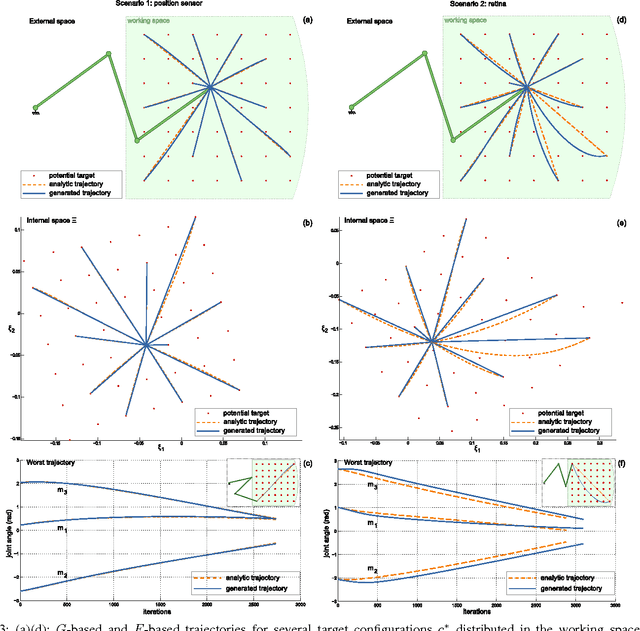
* 6 pages, 3 figures, IROS 2013
View paper on