Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning a Family of Optimal State Feedback Controllers
Paper and Code
Feb 27, 2019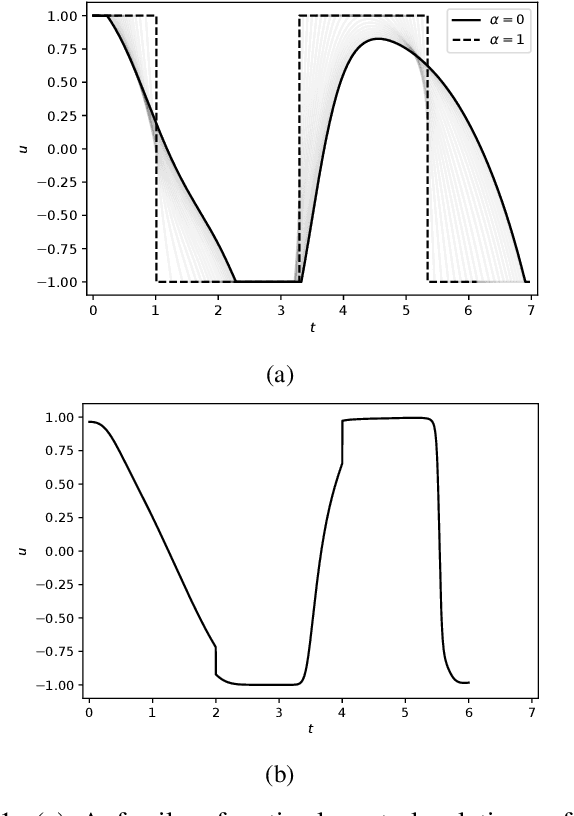

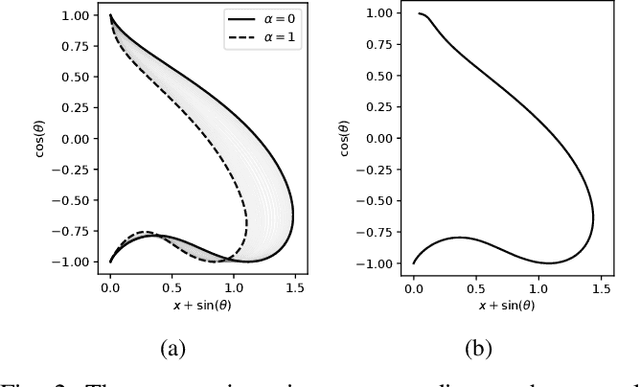
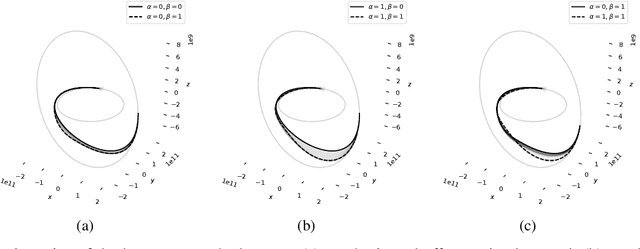
Solving optimal control problems is well known to be very computationally demanding. In this paper we show how a combination of Pontryagin's minimum principle and machine learning can be used to learn optimal feedback controllers for a parametric cost function. This enables an unmanned system with limited computational resources to run optimal feedback controllers, and furthermore change the objective being optimised on the fly in response to external events. Thus, a time optimal control policy can be changed to a fuel optimal one, in the event of e.g., fuel leakage. The proposed approach is illustrated on both a standard inverted pendulum swing-up problem and a more complex interplanetary spacecraft orbital transfer.
* Submitted to 2019 IEEE/RSJ International Conference on Intelligent
Robots and Systems (IROS 2019) and IEEE Robotics and Automation Letters
View paper on