 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning 3D Navigation Protocols on Touch Interfaces with Cooperative Multi-Agent Reinforcement Learning
Paper and Code
Apr 16, 2019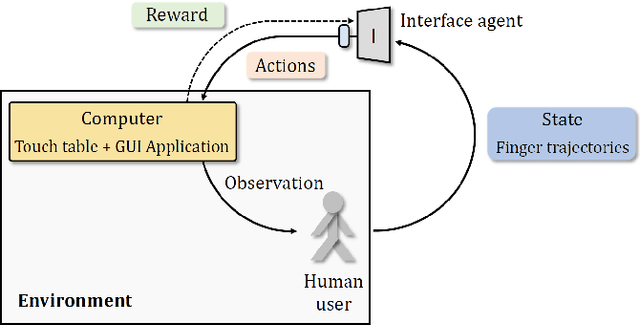
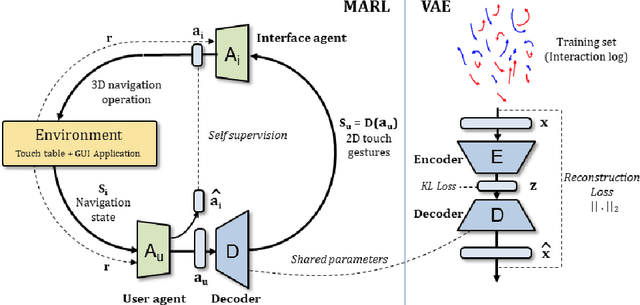
Using touch devices to navigate in virtual 3D environments such as computer assisted design (CAD) models or geographical information systems (GIS) is inherently difficult for humans, as the 3D operations have to be performed by the user on a 2D touch surface. This ill-posed problem is classically solved with a fixed and handcrafted interaction protocol, which must be learned by the user. We propose to automatically learn a new interaction protocol allowing to map a 2D user input to 3D actions in virtual environments using reinforcement learning (RL). A fundamental problem of RL methods is the vast amount of interactions often required, which are difficult to come by when humans are involved. To overcome this limitation, we make use of two collaborative agents. The first agent models the human by learning to perform the 2D finger trajectories. The second agent acts as the interaction protocol, interpreting and translating to 3D operations the 2D finger trajectories from the first agent. We restrict the learned 2D trajectories to be similar to a training set of collected human gestures by first performing state representation learning, prior to reinforcement learning. This state representation learning is addressed by projecting the gestures into a latent space learned by a variational auto encoder (VAE).