 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLEARNEST: LEARNing Enhanced Model-based State ESTimation for Robots using Knowledge-based Neural Ordinary Differential Equations
Paper and Code
Sep 16, 2022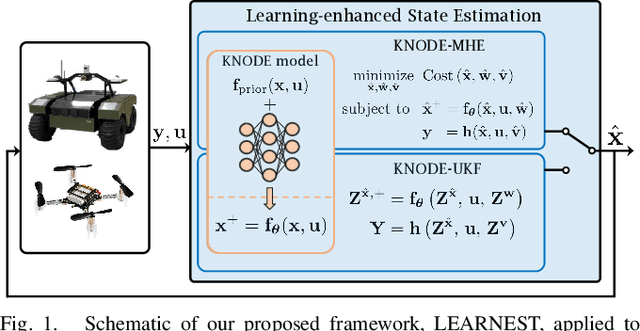
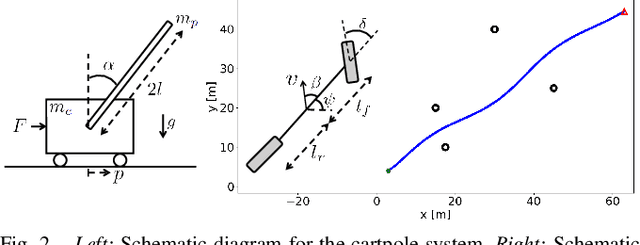
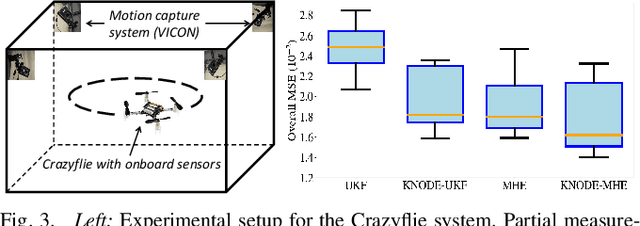
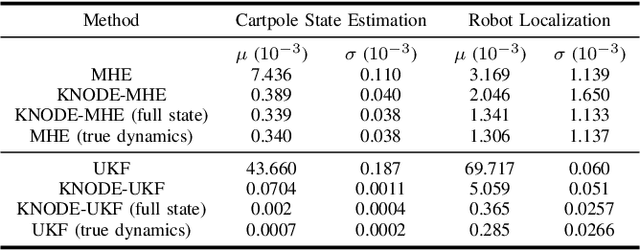
State estimation is an important aspect in many robotics applications. In this work, we consider the task of obtaining accurate state estimates for robotic systems by enhancing the dynamics model used in state estimation algorithms. Existing frameworks such as moving horizon estimation (MHE) and the unscented Kalman filter (UKF) provide the flexibility to incorporate nonlinear dynamics and measurement models. However, this implies that the dynamics model within these algorithms has to be sufficiently accurate in order to warrant the accuracy of the state estimates. To enhance the dynamics models and improve the estimation accuracy, we utilize a deep learning framework known as knowledge-based neural ordinary differential equations (KNODEs). The KNODE framework embeds prior knowledge into the training procedure and synthesizes an accurate hybrid model by fusing a prior first-principles model with a neural ordinary differential equation (NODE) model. In our proposed LEARNEST framework, we integrate the data-driven model into two novel model-based state estimation algorithms, which are denoted as KNODE-MHE and KNODE-UKF. These two algorithms are compared against their conventional counterparts across a number of robotic applications; state estimation for a cartpole system using partial measurements, localization for a ground robot, as well as state estimation for a quadrotor. Through simulations and tests using real-world experimental data, we demonstrate the versatility and efficacy of the proposed learning-enhanced state estimation framework.