 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLatent Space Policies for Hierarchical Reinforcement Learning
Paper and Code
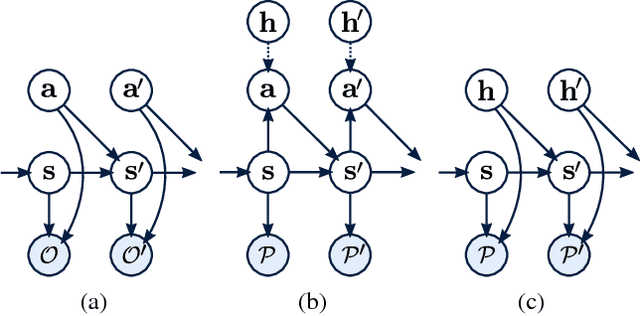
We address the problem of learning hierarchical deep neural network policies for reinforcement learning. In contrast to methods that explicitly restrict or cripple lower layers of a hierarchy to force them to use higher-level modulating signals, each layer in our framework is trained to directly solve the task, but acquires a range of diverse strategies via a maximum entropy reinforcement learning objective. Each layer is also augmented with latent random variables, which are sampled from a prior distribution during the training of that layer. The maximum entropy objective causes these latent variables to be incorporated into the layer's policy, and the higher level layer can directly control the behavior of the lower layer through this latent space. Furthermore, by constraining the mapping from latent variables to actions to be invertible, higher layers retain full expressivity: neither the higher layers nor the lower layers are constrained in their behavior. Our experimental evaluation demonstrates that we can improve on the performance of single-layer policies on standard benchmark tasks simply by adding additional layers, and that our method can solve more complex sparse-reward tasks by learning higher-level policies on top of high-entropy skills optimized for simple low-level objectives.