 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLarge Scale Distributed Collaborative Unlabeled Motion Planning with Graph Policy Gradients
Paper and Code
Feb 11, 2021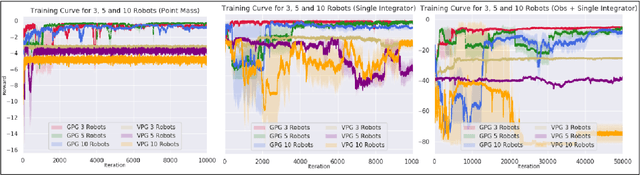
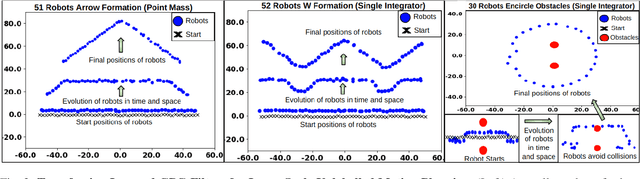
In this paper, we present a learning method to solve the unlabelled motion problem with motion constraints and space constraints in 2D space for a large number of robots. To solve the problem of arbitrary dynamics and constraints we propose formulating the problem as a multi-agent problem. We are able to demonstrate the scalability of our methods for a large number of robots by employing a graph neural network (GNN) to parameterize policies for the robots. The GNN reduces the dimensionality of the problem by learning filters that aggregate information among robots locally, similar to how a convolutional neural network is able to learn local features in an image. Additionally, by employing a GNN we are also able to overcome the computational overhead of training policies for a large number of robots by first training graph filters for a small number of robots followed by zero-shot policy transfer to a larger number of robots. We demonstrate the effectiveness of our framework through various simulations.