 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLanguage-Guided Generation of Physically Realistic Robot Motion and Control
Paper and Code
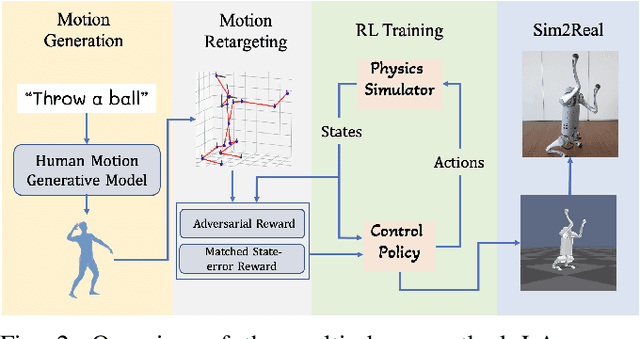
We aim to control a robot to physically behave in the real world following any high-level language command like "cartwheel" or "kick. " Although human motion datasets exist, this task remains particularly challenging since generative models can produce physically unrealistic motions, which will be more severe for robots due to different body structures and physical properties. In addition, to control a physical robot to perform a desired motion, a control policy must be learned. We develop LAnguage-Guided mOtion cONtrol (LAGOON), a multi-phase method to generate physically realistic robot motions under language commands. LAGOON first leverages a pre-trained model to generate human motion from a language command. Then an RL phase is adopted to train a control policy in simulation to mimic the generated human motion. Finally, with domain randomization, we show that our learned policy can be successfully deployed to a quadrupedal robot, leading to a robot dog that can stand up and wave its front legs in the real world to mimic the behavior of a hand-waving human.