 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLane Change Classification and Prediction with Action Recognition Networks
Paper and Code
Aug 24, 2022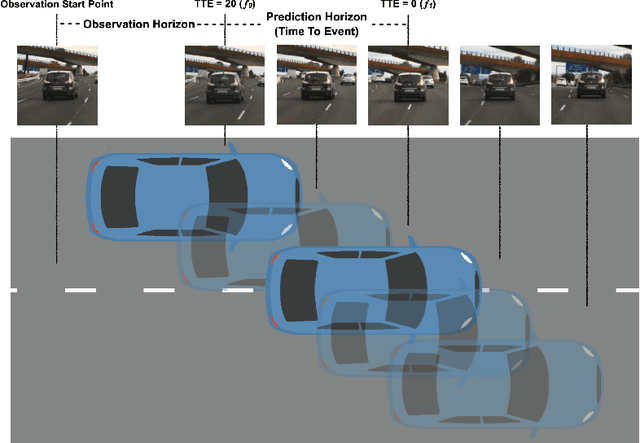
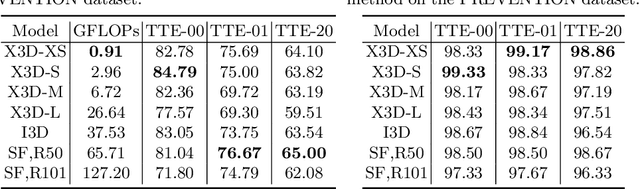
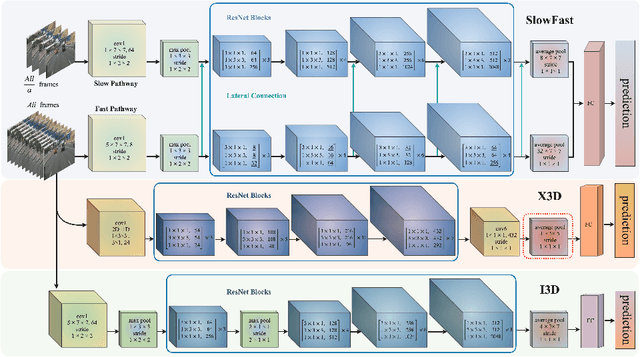
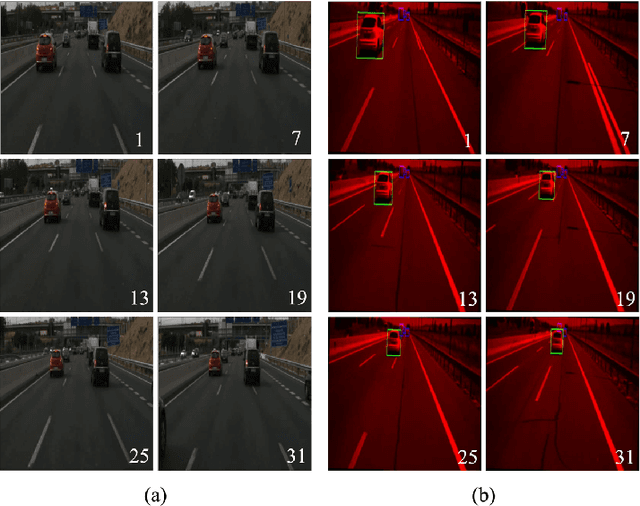
Anticipating lane change intentions of surrounding vehicles is crucial for efficient and safe driving decision making in an autonomous driving system. Previous works often adopt physical variables such as driving speed, acceleration and so forth for lane change classification. However, physical variables do not contain semantic information. Although 3D CNNs have been developing rapidly, the number of methods utilising action recognition models and appearance feature for lane change recognition is low, and they all require additional information to pre-process data. In this work, we propose an end-to-end framework including two action recognition methods for lane change recognition, using video data collected by cameras. Our method achieves the best lane change classification results using only the RGB video data of the PREVENTION dataset. Class activation maps demonstrate that action recognition models can efficiently extract lane change motions. A method to better extract motion clues is also proposed in this paper.