 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLandscape of Neural Architecture Search across sensors: how much do they differ ?
Paper and Code
Jan 20, 2022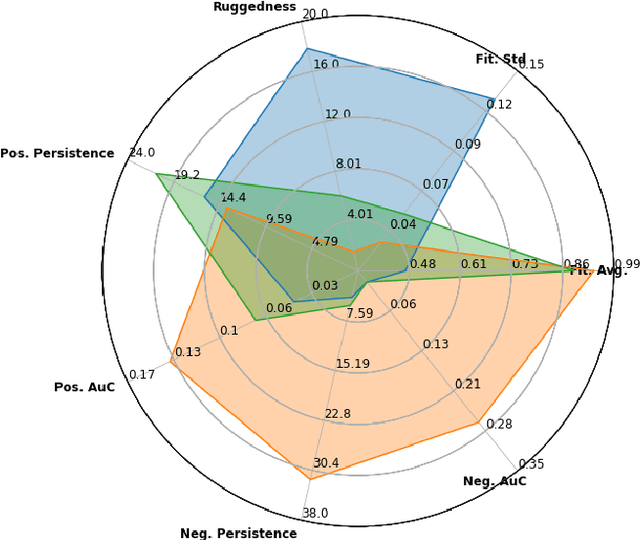
With the rapid rise of neural architecture search, the ability to understand its complexity from the perspective of a search algorithm is desirable. Recently, Traor\'e et al. have proposed the framework of Fitness Landscape Footprint to help describe and compare neural architecture search problems. It attempts at describing why a search strategy might be successful, struggle or fail on a target task. Our study leverages this methodology in the context of searching across sensors, including sensor data fusion. In particular, we apply the Fitness Landscape Footprint to the real-world image classification problem of So2Sat LCZ42, in order to identify the most beneficial sensor to our neural network hyper-parameter optimization problem. From the perspective of distributions of fitness, our findings indicate a similar behaviour of the search space for all sensors: the longer the training time, the larger the overall fitness, and more flatness in the landscapes (less ruggedness and deviation). Regarding sensors, the better the fitness they enable (Sentinel-2), the better the search trajectories (smoother, higher persistence). Results also indicate very similar search behaviour for sensors that can be decently fitted by the search space (Sentinel-2 and fusion).