 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJoint Supervised and Self-Supervised Learning for 3D Real-World Challenges
Paper and Code
Apr 15, 2020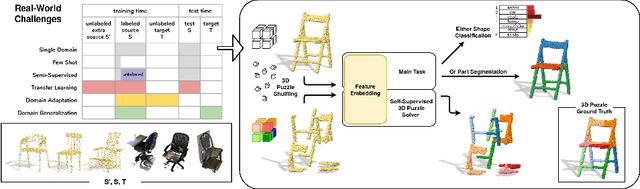
Point cloud processing and 3D shape understanding are very challenging tasks for which deep learning techniques have demonstrated great potentials. Still further progresses are essential to allow artificial intelligent agents to interact with the real world, where the amount of annotated data may be limited and integrating new sources of knowledge becomes crucial to support autonomous learning. Here we consider several possible scenarios involving synthetic and real-world point clouds where supervised learning fails due to data scarcity and large domain gaps. We propose to enrich standard feature representations by leveraging self-supervision through a multi-task model that can solve a 3D puzzle while learning the main task of shape classification or part segmentation. An extensive analysis investigating few-shot, transfer learning and cross-domain settings shows the effectiveness of our approach with state-of-the-art results for 3D shape classification and part segmentation.