 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJoint Prediction of Depths, Normals and Surface Curvature from RGB Images using CNNs
Paper and Code
Jun 23, 2017
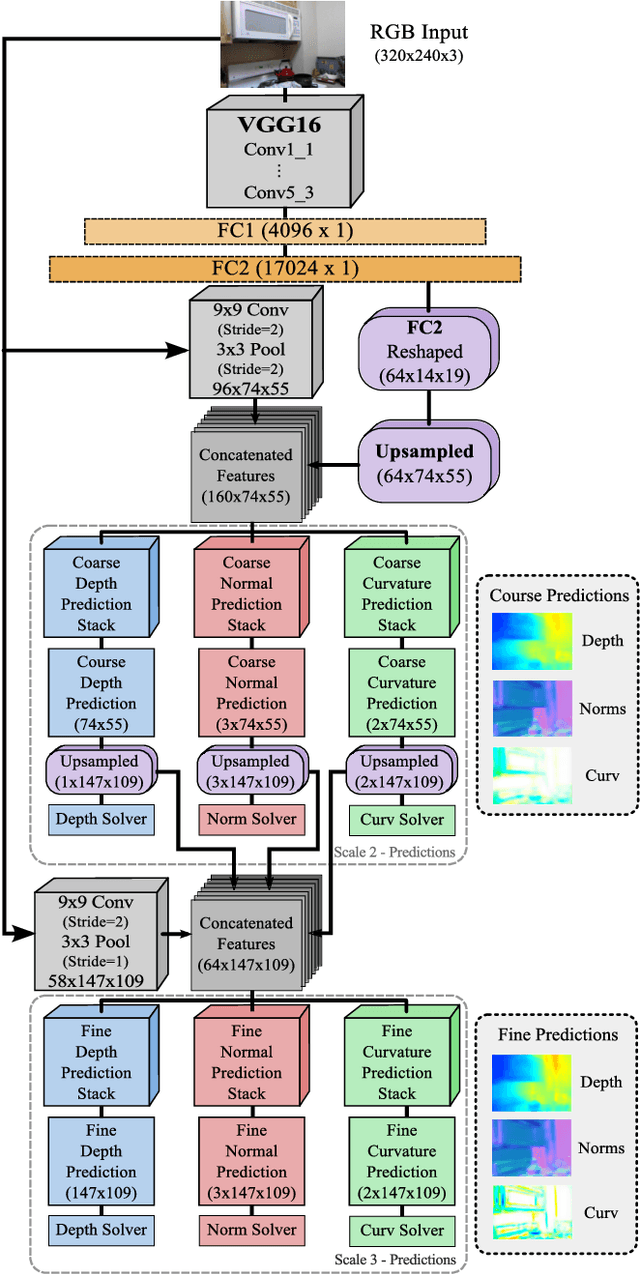
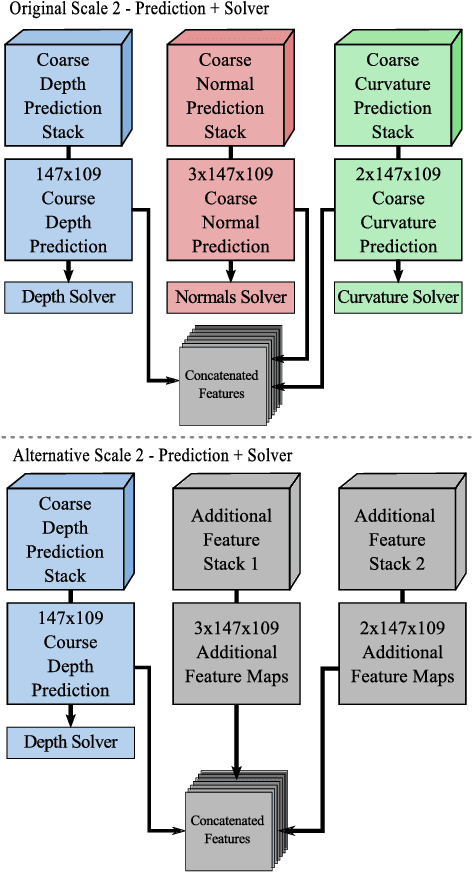
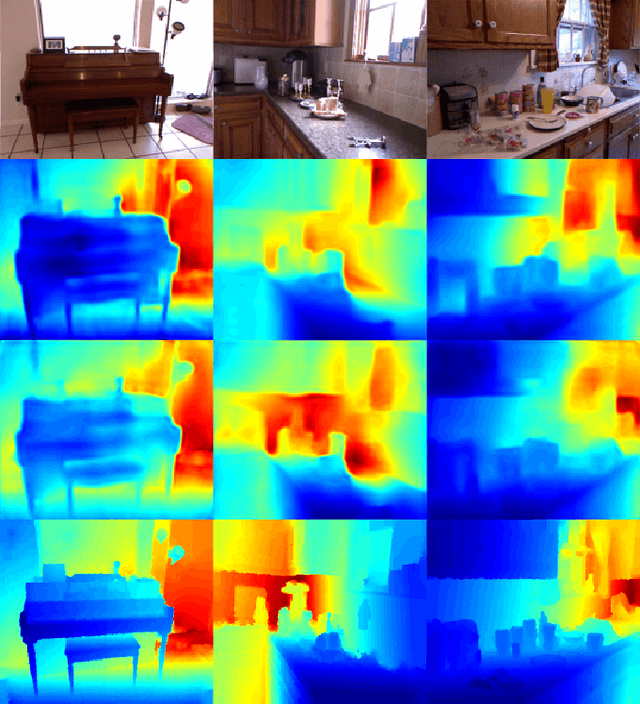
Understanding the 3D structure of a scene is of vital importance, when it comes to developing fully autonomous robots. To this end, we present a novel deep learning based framework that estimates depth, surface normals and surface curvature by only using a single RGB image. To the best of our knowledge this is the first work to estimate surface curvature from colour using a machine learning approach. Additionally, we demonstrate that by tuning the network to infer well designed features, such as surface curvature, we can achieve improved performance at estimating depth and normals.This indicates that network guidance is still a useful aspect of designing and training a neural network. We run extensive experiments where the network is trained to infer different tasks while the model capacity is kept constant resulting in different feature maps based on the tasks at hand. We outperform the previous state-of-the-art benchmarks which jointly estimate depths and surface normals while predicting surface curvature in parallel.