 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJoint Image and Depth Estimation with Mask-Based Lensless Cameras
Paper and Code
Oct 06, 2019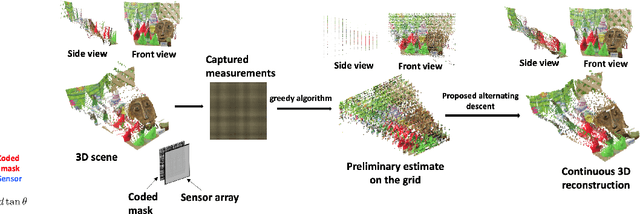
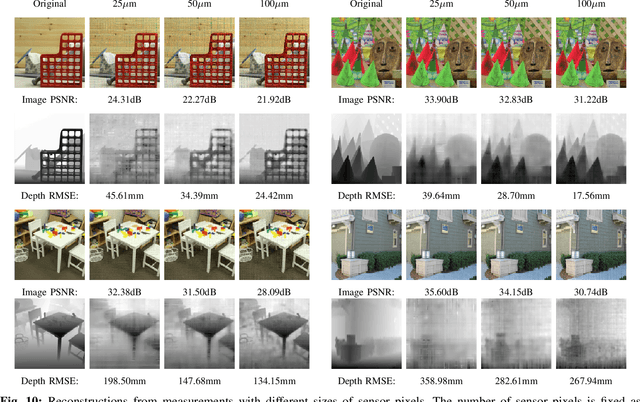
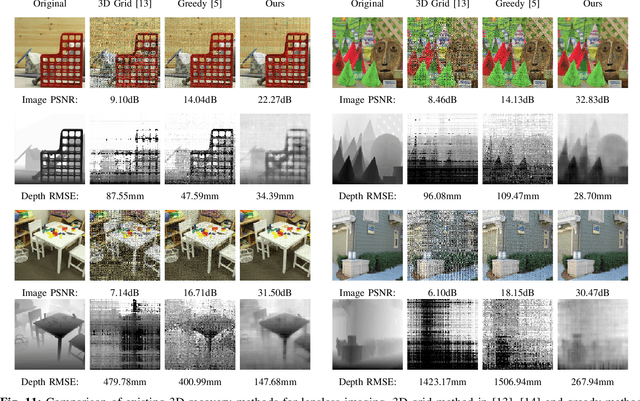
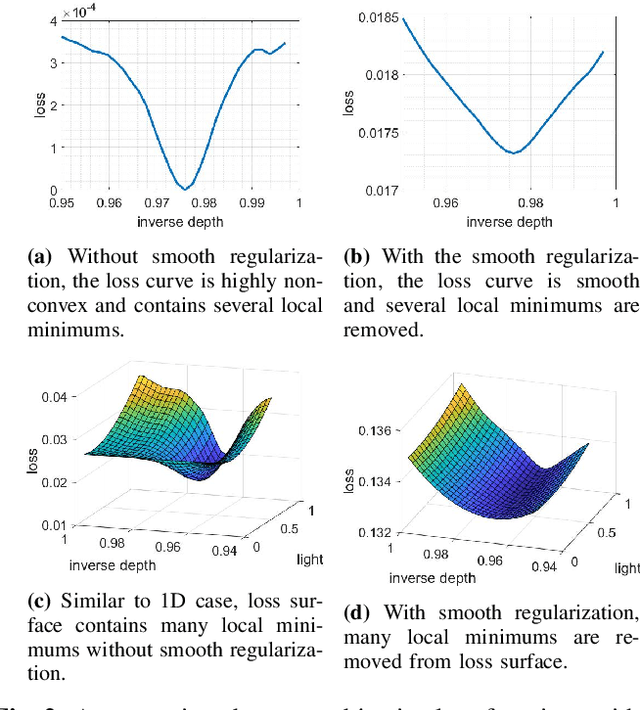
Mask-based lensless cameras replace the lens of a conventional camera with a customized mask. These cameras can potentially be very thin and even flexible. Recently, it has been demonstrated that such mask-based cameras can recover light intensity and depth information of a scene. Existing depth recovery algorithms either assume that the scene consists of a small number of depth planes or solve a sparse recovery problem over a large 3D volume. Both these approaches fail to recover scene with large depth variations. In this paper, we propose a new approach for depth estimation based on alternating gradient descent algorithm that jointly estimates a continuous depth map and light distribution of the unknown scene from its lensless measurements. The computational complexity of the algorithm scales linearly with the spatial dimension of the imaging system. We present simulation results on image and depth reconstruction for a variety of 3D test scenes. A comparison between the proposed algorithm and other method shows that our algorithm is faster and more robust for natural scenes with a large range of depths.