 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJerk-limited Real-time Trajectory Generation with Arbitrary Target States
Paper and Code
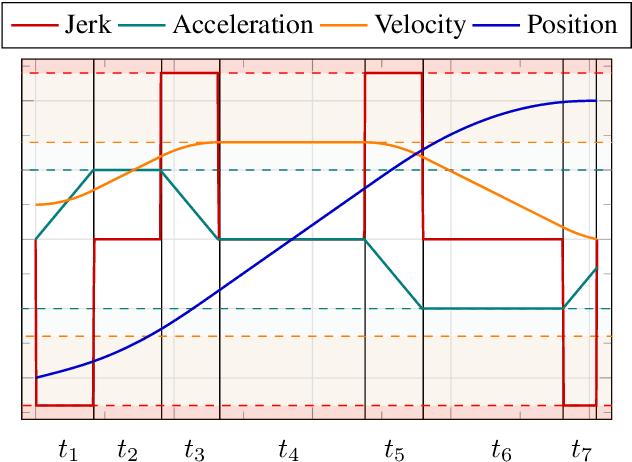
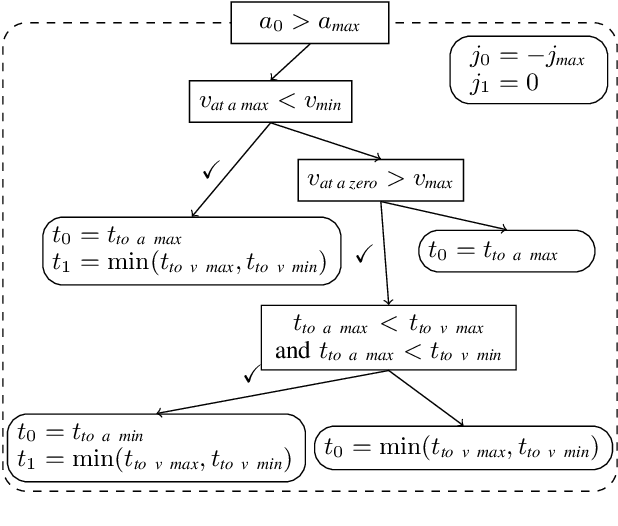
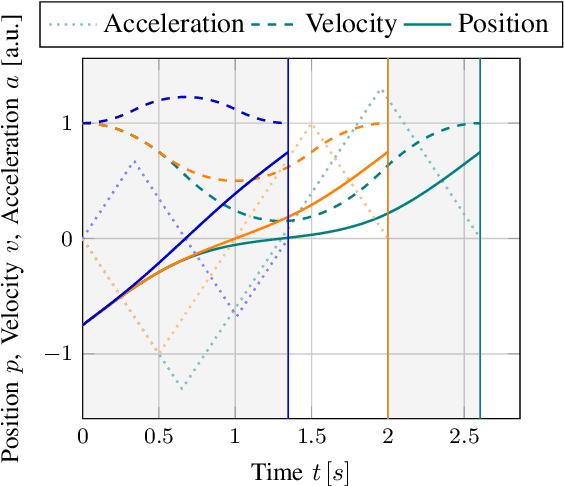
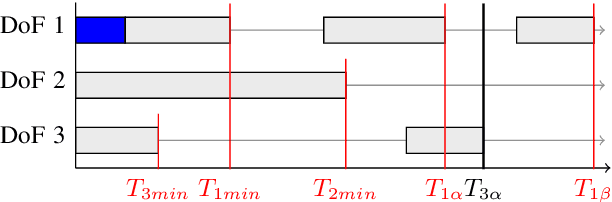
We present Ruckig, an algorithm for Online Trajectory Generation (OTG) respecting third-order constraints and complete kinematic target states. Given any initial state of a system with multiple Degrees of Freedom (DoFs), Ruckig calculates a time-optimal trajectory to an arbitrary target state defined by its position, velocity, and acceleration limited by velocity, acceleration, and jerk constraints. The proposed algorithm and implementation allows three contributions: (1) To the best of our knowledge, we derive the first OTG algorithm with non-zero target acceleration, resulting in a complete defined target state. (2) This is the first open-source prototype of time-optimal OTG with limited jerk. (3) Ruckig allows for directional velocity and acceleration limits, enabling robots to better use their dynamical resources. We evaluate the robustness and real-time capability of the proposed algorithm on a test suite with over 1,000,000,000 random trajectories as well as in real-world applications.