 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJacquard: A Large Scale Dataset for Robotic Grasp Detection
Paper and Code
Sep 28, 2018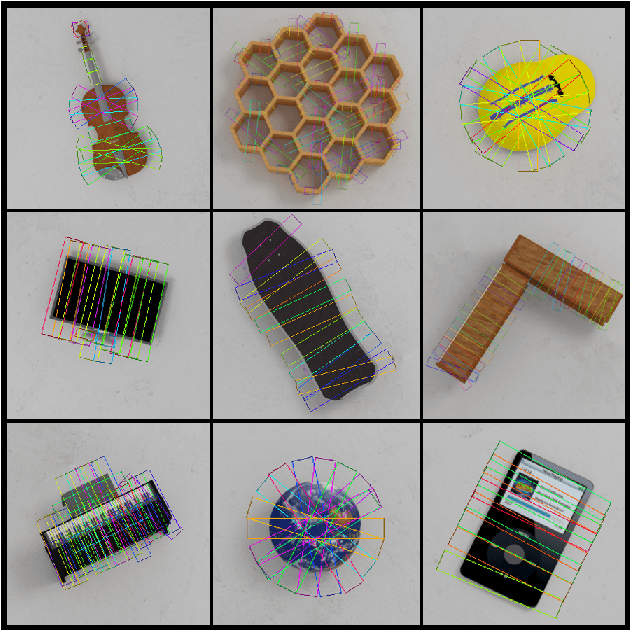
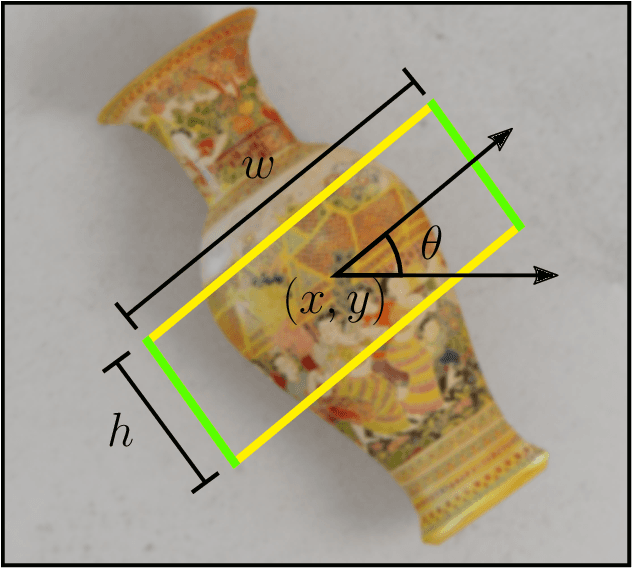
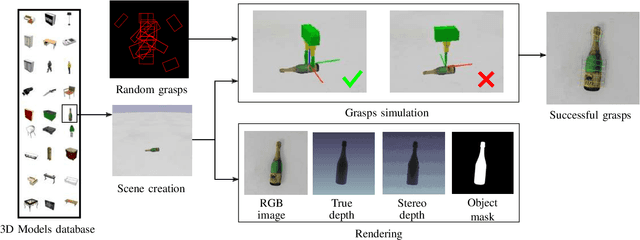
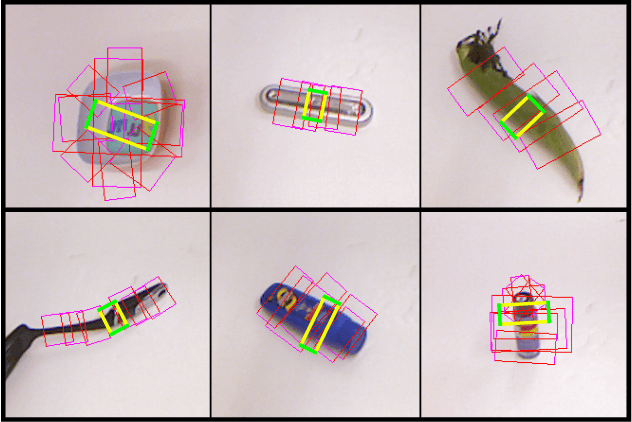
Grasping skill is a major ability that a wide number of real-life applications require for robotisation. State-of-the-art robotic grasping methods perform prediction of object grasp locations based on deep neural networks. However, such networks require huge amount of labeled data for training making this approach often impracticable in robotics. In this paper, we propose a method to generate a large scale synthetic dataset with ground truth, which we refer to as the Jacquard grasping dataset. Jacquard is built on a subset of ShapeNet, a large CAD models dataset, and contains both RGB-D images and annotations of successful grasping positions based on grasp attempts performed in a simulated environment. We carried out experiments using an off-the-shelf CNN, with three different evaluation metrics, including real grasping robot trials. The results show that Jacquard enables much better generalization skills than a human labeled dataset thanks to its diversity of objects and grasping positions. For the purpose of reproducible research in robotics, we are releasing along with the Jacquard dataset a web interface for researchers to evaluate the successfulness of their grasping position detections using our dataset.