 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIterative Sequential Action Control for Stable, Model-Based Control of Nonlinear Systems
Paper and Code
Oct 26, 2018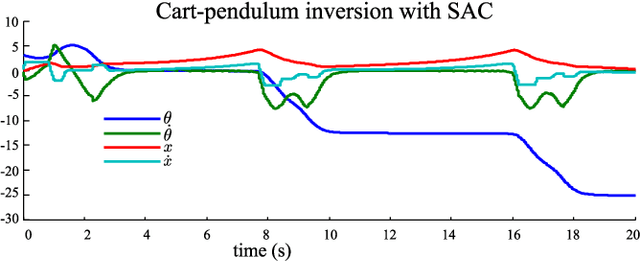

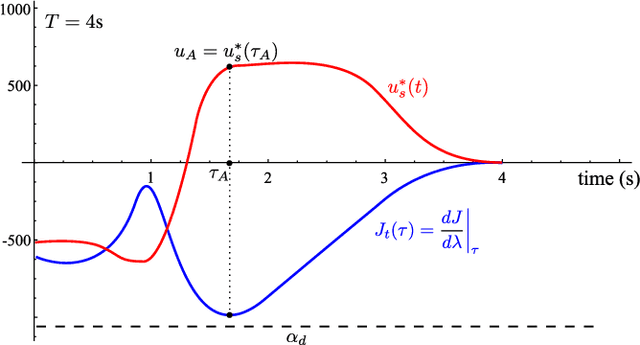
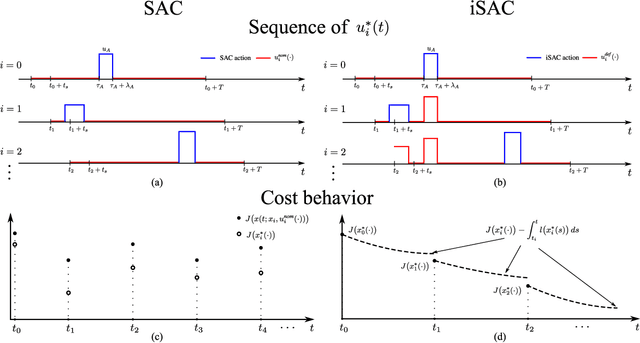
This paper presents iterative Sequential Action Control (iSAC), a receding horizon approach for control of nonlinear systems. The iSAC method has a closed-form open-loop solution, which is iteratively updated between time steps by introducing constant control values applied for short duration. Application of a contractive constraint on the cost is shown to lead to closed-loop asymptotic stability under mild assumptions. The effect of asymptotically decaying disturbances on system trajectories is also examined. To demonstrate the applicability of iSAC to a variety of systems and conditions, we employ five different systems, including a 13-dimensional quaternion-based quadrotor. Each system is tested in different scenarios, ranging from feasible and infeasible trajectory tracking, to setpoint stabilization, with or without the presence of external disturbances. Finally, limitations of this work are discussed.