 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIs it Safe to Drive? An Overview of Factors, Challenges, and Datasets for Driveability Assessment in Autonomous Driving
Paper and Code
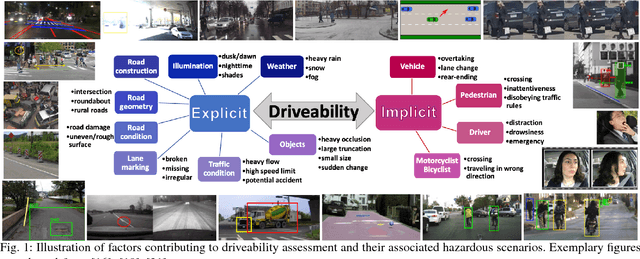



With recent advances in learning algorithms and hardware development, autonomous cars have shown promise when operating in structured environments under good driving conditions. However, for complex, cluttered and unseen environments with high uncertainty, autonomous driving systems still frequently demonstrate erroneous or unexpected behaviors, that could lead to catastrophic outcomes. Autonomous vehicles should ideally adapt to driving conditions; while this can be achieved through multiple routes, it would be beneficial as a first step to be able to characterize Driveability in some quantified form. To this end, this paper aims to create a framework for investigating different factors that can impact driveability. Also, one of the main mechanisms to adapt autonomous driving systems to any driving condition is to be able to learn and generalize from representative scenarios. The machine learning algorithms that currently do so learn predominantly in a supervised manner and consequently need sufficient data for robust and efficient learning. Therefore, we also perform a comparative overview of 45 public driving datasets that enable learning and publish this dataset index at https://sites.google.com/view/driveability-survey-datasets. Specifically, we categorize the datasets according to use cases, and highlight the datasets that capture complicated and hazardous driving conditions which can be better used for training robust driving models. Furthermore, by discussions of what driving scenarios are not covered by existing public datasets and what driveability factors need more investigation and data acquisition, this paper aims to encourage both targeted dataset collection and the proposal of novel driveability metrics that enhance the robustness of autonomous cars in adverse environments.