 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntuitive Hand Teleoperation by Novice Operators Using a Continuous Teleoperation Subspace
Paper and Code
Feb 12, 2018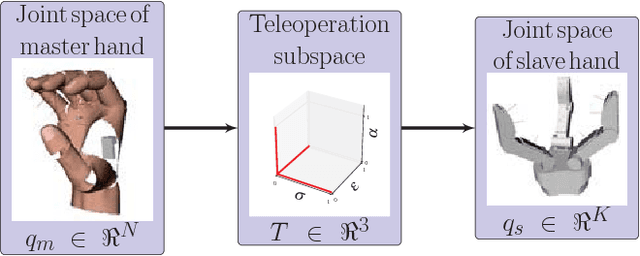
Human-in-the-loop manipulation is useful in when autonomous grasping is not able to deal sufficiently well with corner cases or cannot operate fast enough. Using the teleoperator's hand as an input device can provide an intuitive control method but requires mapping between pose spaces which may not be similar. We propose a low-dimensional and continuous teleoperation subspace which can be used as an intermediary for mapping between different hand pose spaces. We present an algorithm to project between pose space and teleoperation subspace. We use a non-anthropomorphic robot to experimentally prove that it is possible for teleoperation subspaces to effectively and intuitively enable teleoperation. In experiments, novice users completed pick and place tasks significantly faster using teleoperation subspace mapping than they did using state of the art teleoperation methods.