 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntrospection-based Explainable Reinforcement Learning in Episodic and Non-episodic Scenarios
Paper and Code
Nov 23, 2022


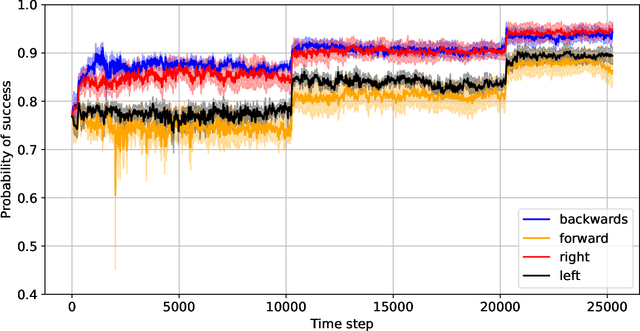
With the increasing presence of robotic systems and human-robot environments in today's society, understanding the reasoning behind actions taken by a robot is becoming more important. To increase this understanding, users are provided with explanations as to why a specific action was taken. Among other effects, these explanations improve the trust of users in their robotic partners. One option for creating these explanations is an introspection-based approach which can be used in conjunction with reinforcement learning agents to provide probabilities of success. These can in turn be used to reason about the actions taken by the agent in a human-understandable fashion. In this work, this introspection-based approach is developed and evaluated further on the basis of an episodic and a non-episodic robotics simulation task. Furthermore, an additional normalization step to the Q-values is proposed, which enables the usage of the introspection-based approach on negative and comparatively small Q-values. Results obtained show the viability of introspection for episodic robotics tasks and, additionally, that the introspection-based approach can be used to generate explanations for the actions taken in a non-episodic robotics environment as well.