Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInterpretable Apprenticeship Learning with Temporal Logic Specifications
Paper and Code
Oct 28, 2017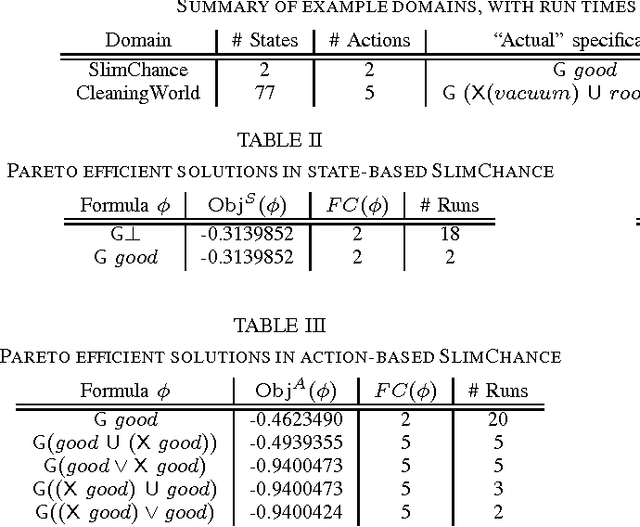
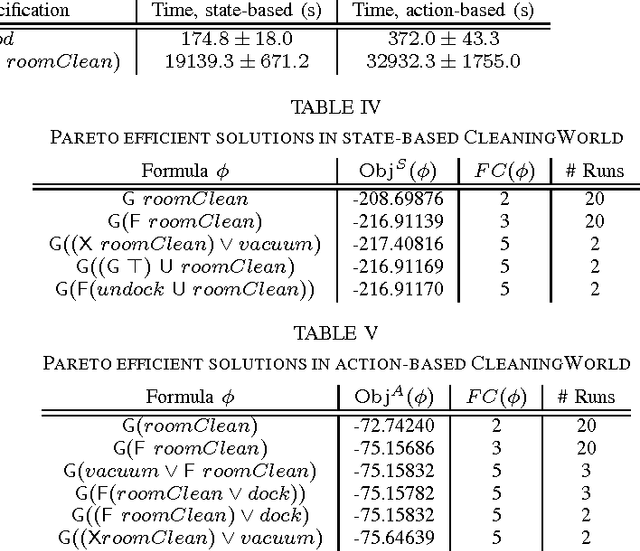
Recent work has addressed using formulas in linear temporal logic (LTL) as specifications for agents planning in Markov Decision Processes (MDPs). We consider the inverse problem: inferring an LTL specification from demonstrated behavior trajectories in MDPs. We formulate this as a multiobjective optimization problem, and describe state-based ("what actually happened") and action-based ("what the agent expected to happen") objective functions based on a notion of "violation cost". We demonstrate the efficacy of the approach by employing genetic programming to solve this problem in two simple domains.
* Accepted to the 56th IEEE Conference on Decision and Control (CDC
2017)
View paper on