 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInteractive Robotic Grasping with Attribute-Guided Disambiguation
Paper and Code
Mar 15, 2022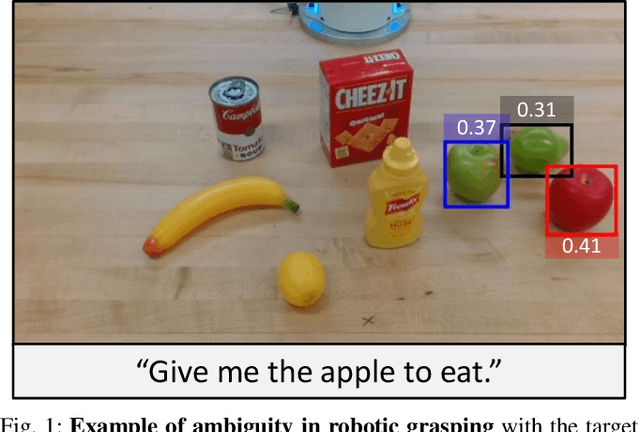
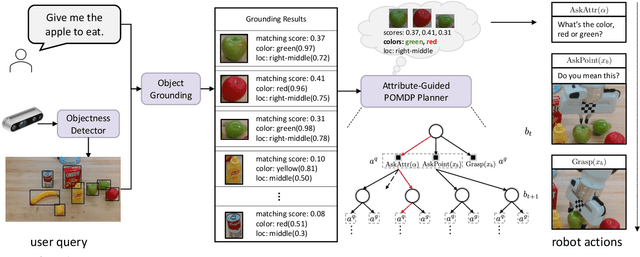
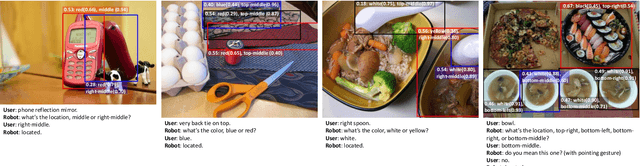
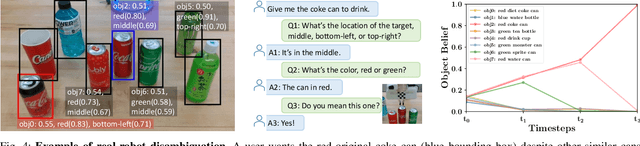
Interactive robotic grasping using natural language is one of the most fundamental tasks in human-robot interaction. However, language can be a source of ambiguity, particularly when there are ambiguous visual or linguistic contents. This paper investigates the use of object attributes in disambiguation and develops an interactive grasping system capable of effectively resolving ambiguities via dialogues. Our approach first predicts target scores and attribute scores through vision-and-language grounding. To handle ambiguous objects and commands, we propose an attribute-guided formulation of the partially observable Markov decision process (Attr-POMDP) for disambiguation. The Attr-POMDP utilizes target and attribute scores as the observation model to calculate the expected return of an attribute-based (e.g., "what is the color of the target, red or green?") or a pointing-based (e.g., "do you mean this one?") question. Our disambiguation module runs in real time on a real robot, and the interactive grasping system achieves a 91.43\% selection accuracy in the real-robot experiments, outperforming several baselines by large margins.