 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInteractive Hierarchical Guidance using Language
Paper and Code
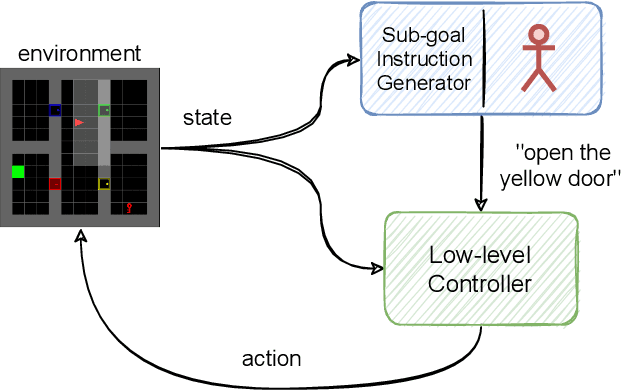



Reinforcement learning has been successful in many tasks ranging from robotic control, games, energy management etc. In complex real world environments with sparse rewards and long task horizons, sample efficiency is still a major challenge. Most complex tasks can be easily decomposed into high-level planning and low level control. Therefore, it is important to enable agents to leverage the hierarchical structure and decompose bigger tasks into multiple smaller sub-tasks. We introduce an approach where we use language to specify sub-tasks and a high-level planner issues language commands to a low level controller. The low-level controller executes the sub-tasks based on the language commands. Our experiments show that this method is able to solve complex long horizon planning tasks with limited human supervision. Using language has added benefit of interpretability and ability for expert humans to take over the high-level planning task and provide language commands if necessary.