 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntelligent Agent-Based Stimulation for Testing Robotic Software in Human-Robot Interactions
Paper and Code
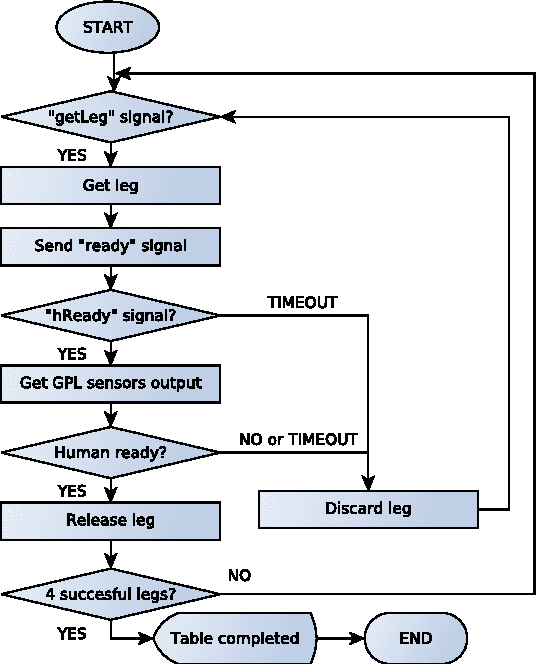


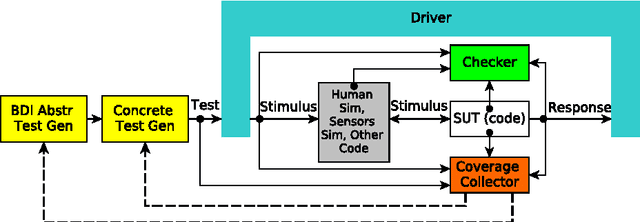
The challenges of robotic software testing extend beyond conventional software testing. Valid, realistic and interesting tests need to be generated for multiple programs and hardware running concurrently, deployed into dynamic environments with people. We investigate the use of Belief-Desire-Intention (BDI) agents as models for test generation, in the domain of human-robot interaction (HRI) in simulations. These models provide rational agency, causality, and a reasoning mechanism for planning, which emulate both intelligent and adaptive robots, as well as smart testing environments directed by humans. We introduce reinforcement learning (RL) to automate the exploration of the BDI models using a reward function based on coverage feedback. Our approach is evaluated using a collaborative manufacture example, where the robotic software under test is stimulated indirectly via a simulated human co-worker. We conclude that BDI agents provide intuitive models for test generation in the HRI domain. Our results demonstrate that RL can fully automate BDI model exploration, leading to very effective coverage-directed test generation.