 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntegrating Task-Motion Planning with Reinforcement Learning for Robust Decision Making in Mobile Robots
Paper and Code
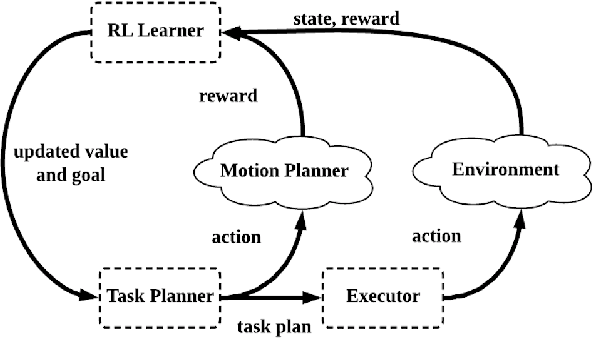

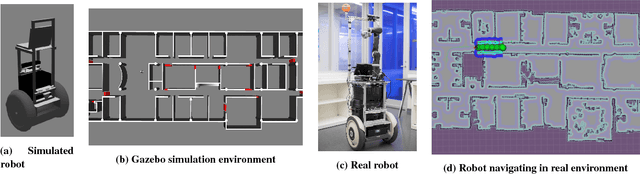
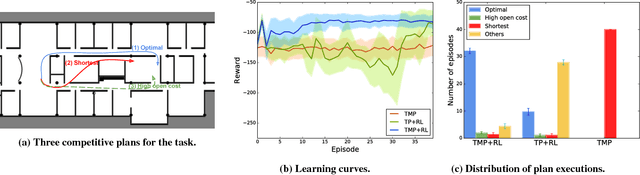
Task-motion planning (TMP) addresses the problem of efficiently generating executable and low-cost task plans in a discrete space such that the (initially unknown) action costs are determined by motion plans in a corresponding continuous space. However, a task-motion plan can be sensitive to unexpected domain uncertainty and changes, leading to suboptimal behaviors or execution failures. In this paper, we propose a novel framework, TMP-RL, which is an integration of TMP and reinforcement learning (RL) from the execution experience, to solve the problem of robust task-motion planning in dynamic and uncertain domains. TMP-RL features two nested planning-learning loops. In the inner TMP loop, the robot generates a low-cost, feasible task-motion plan by iteratively planning in the discrete space and updating relevant action costs evaluated by the motion planner in continuous space. In the outer loop, the plan is executed, and the robot learns from the execution experience via model-free RL, to further improve its task-motion plans. RL in the outer loop is more accurate to the current domain but also more expensive, and using less costly task and motion planning leads to a jump-start for learning in the real world. Our approach is evaluated on a mobile service robot conducting navigation tasks in an office area. Results show that TMP-RL approach significantly improves adaptability and robustness (in comparison to TMP methods) and leads to rapid convergence (in comparison to task planning (TP)-RL methods). We also show that TMP-RL can reuse learned values to smoothly adapt to new scenarios during long-term deployments.