 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInsertionNet -- A Scalable Solution for Insertion
Paper and Code
Apr 29, 2021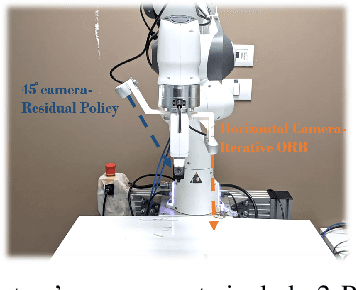
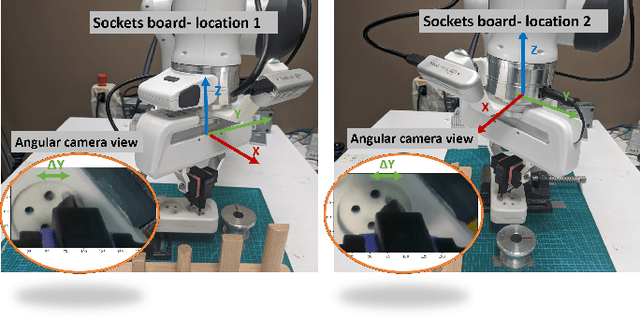
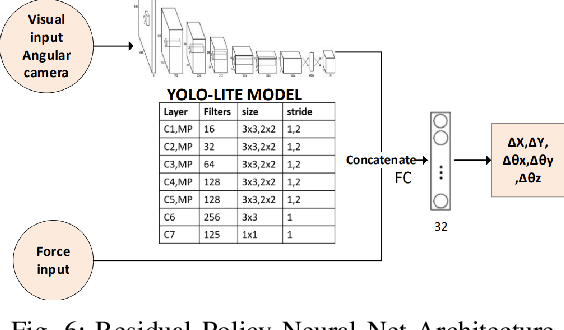
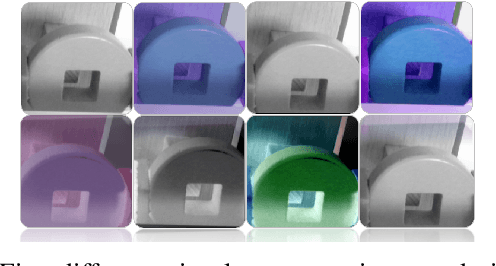
Complicated assembly processes can be described as a sequence of two main activities: grasping and insertion. While general grasping solutions are common in industry, insertion is still only applicable to small subsets of problems, mainly ones involving simple shapes in fixed locations and in which the variations are not taken into consideration. Recently, RL approaches with prior knowledge (e.g., LfD or residual policy) have been adopted. However, these approaches might be problematic in contact-rich tasks since interaction might endanger the robot and its equipment. In this paper, we tackled this challenge by formulating the problem as a regression problem. By combining visual and force inputs, we demonstrate that our method can scale to 16 different insertion tasks in less than 10 minutes. The resulting policies are robust to changes in the socket position, orientation or peg color, as well as to small differences in peg shape. Finally, we demonstrate an end-to-end solution for 2 complex assembly tasks with multi-insertion objectives when the assembly board is randomly placed on a table.