 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInfrastructure-enabled GPS Spoofing Detection and Correction
Paper and Code
Feb 11, 2022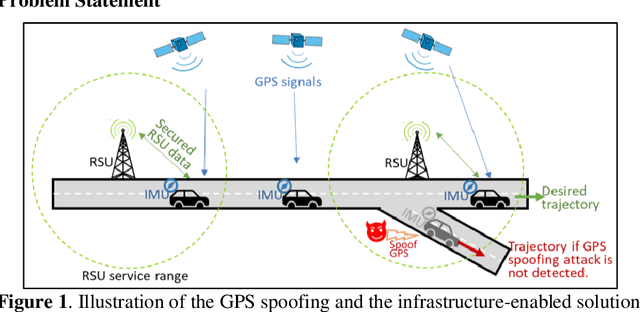
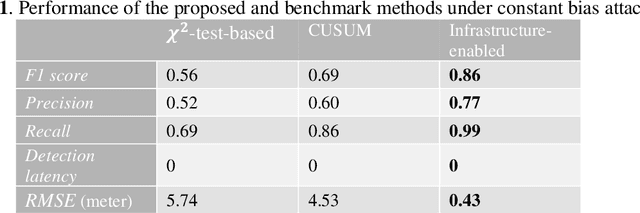
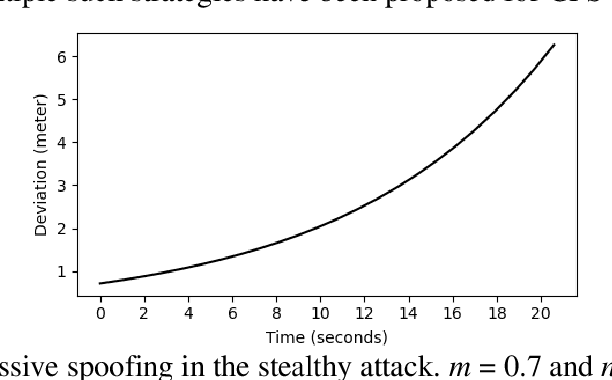
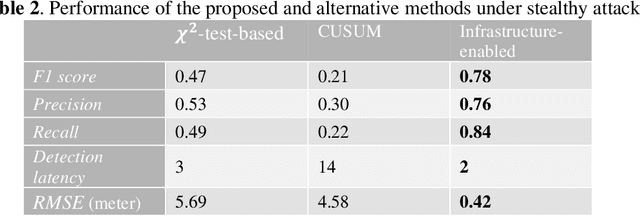
Accurate and robust localization is crucial for supporting high-level driving automation and safety. Modern localization solutions rely on various sensors, among which GPS has been and will continue to be essential. However, GPS can be vulnerable to malicious attacks and GPS spoofing has been identified as a high threat. GPS spoofing injects false information into true GPS measurements, aiming to deviate a vehicle from its true trajectory, endangering the safety of road users. With various types of vehicle-based sensors emerging, recent studies propose to detect GPS spoofing by fusing data from multiple sensors and identifying inconsistencies among them. Yet, these methods often require sophisticated algorithms and cannot handle stealthy or coordinated attacks targeting multiple sensors. With infrastructure becoming increasingly important in supporting emerging vehicle technologies and systems (e.g., automated vehicles), this study explores the potential of applying infrastructure data in defending against GPS spoofing. We propose an infrastructure-enabled method by deploying roadside infrastructure as an independent, secured data source. A real-time detector, based on the Isolation Forest, is constructed to detect GPS spoofing. Once spoofing is detected, GPS measurements are isolated, and the potentially compromised location estimator is corrected using the infrastructure data. The proposed method relies less on vehicular onboard data than existing solutions. Enabled by the secure infrastructure data, we can design a simpler yet more effective solution against GPS spoofing, compared with state-of-the-art defense methods. We test the proposed method using both simulation data and real-world GPS data, and show its effectiveness in defending various types of GPS spoofing attacks, including a type of stealthy attacks that are proposed to fail the production-grade autonomous driving systems.