Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInfluence of Pointing on Learning to Count: A Neuro-Robotics Model
Paper and Code
Jul 09, 2019

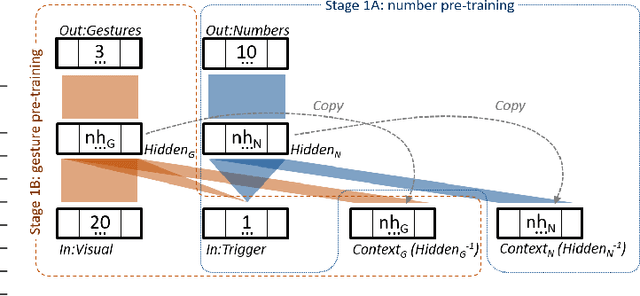

In this paper a neuro-robotics model capable of counting using gestures is introduced. The contribution of gestures to learning to count is tested with various model and training conditions. Two studies were presented in this article. In the first, we combine different modalities of the robot's neural network, in the second, a novel training procedure for it is proposed. The model is trained with pointing data from an iCub robot simulator. The behaviour of the model is in line with that of human children in terms of performance change depending on gesture production.
* 8 pages, 5 figures. In Proceedings of the 2018 IEEE Symposium Series
on Computational Intelligence (SSCI) (pp. 358-365). IEEE
View paper on