 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIndividuality in Swarm Robots with the Case Study of Kilobots: Noise, Bug, or Feature?
Paper and Code


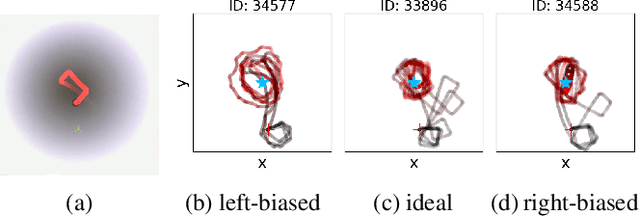
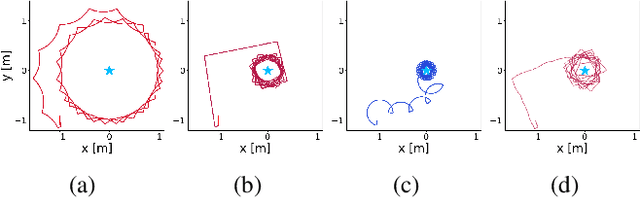
Inter-individual differences are studied in natural systems, such as fish, bees, and humans, as they contribute to the complexity of both individual and collective behaviors. However, individuality in artificial systems, such as robotic swarms, is undervalued or even overlooked. Agent-specific deviations from the norm in swarm robotics are usually understood as mere noise that can be minimized, for example, by calibration. We observe that robots have consistent deviations and argue that awareness and knowledge of these can be exploited to serve a task. We measure heterogeneity in robot swarms caused by individual differences in how robots act, sense, and oscillate. Our use case is Kilobots and we provide example behaviors where the performance of robots varies depending on individual differences. We show a non-intuitive example of phototaxis with Kilobots where the non-calibrated Kilobots show better performance than the calibrated supposedly ``ideal" one. We measure the inter-individual variations for heterogeneity in sensing and oscillation, too. We briefly discuss how these variations can enhance the complexity of collective behaviors. We suggest that by recognizing and exploring this new perspective on individuality, and hence diversity, in robotic swarms, we can gain a deeper understanding of these systems and potentially unlock new possibilities for their design and implementation of applications.