 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIncremental Real-Time Multibody VSLAM with Trajectory Optimization Using Stereo Camera
Paper and Code
Aug 02, 2016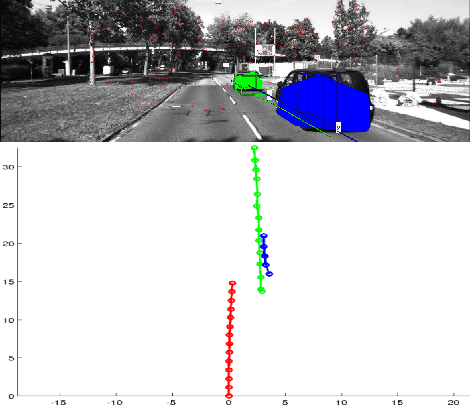
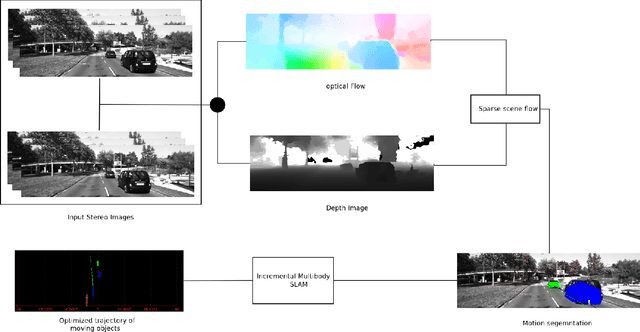
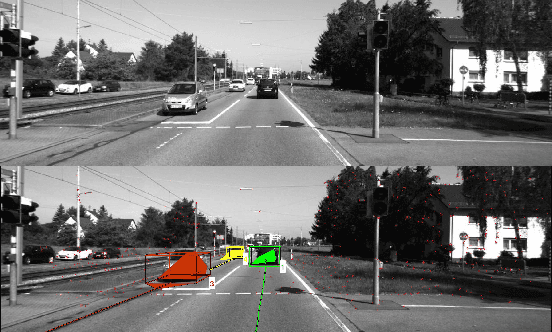
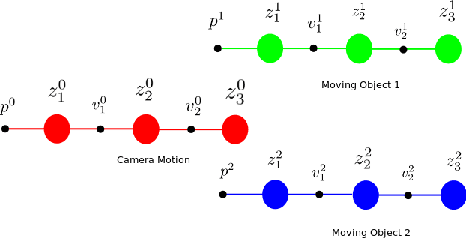
Real time outdoor navigation in highly dynamic environments is an crucial problem. The recent literature on real time static SLAM don't scale up to dynamic outdoor environments. Most of these methods assume moving objects as outliers or discard the information provided by them. We propose an algorithm to jointly infer the camera trajectory and the moving object trajectory simultaneously. In this paper, we perform a sparse scene flow based motion segmentation using a stereo camera. The segmented objects motion models are used for accurate localization of the camera trajectory as well as the moving objects. We exploit the relationship between moving objects for improving the accuracy of the poses. We formulate the poses as a factor graph incorporating all the constraints. We achieve exact incremental solution by solving a full nonlinear optimization problem in real time. The evaluation is performed on the challenging KITTI dataset with multiple moving cars.Our method outperforms the previous baselines in outdoor navigation.