Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIncorporating Gaze into Social Navigation
Paper and Code
Jul 10, 2021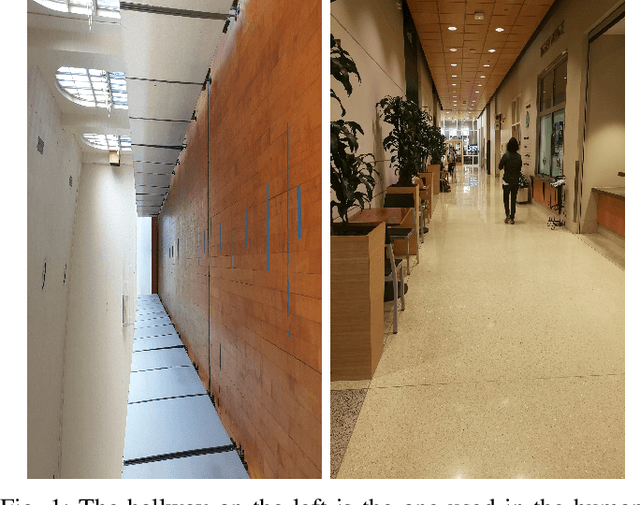
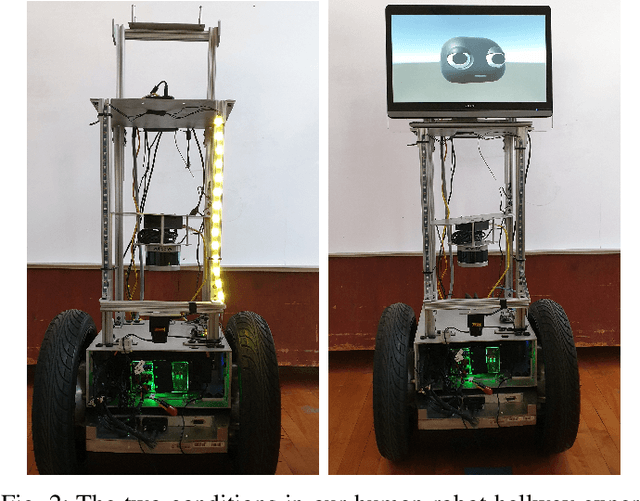
Most current approaches to social navigation focus on the trajectory and position of participants in the interaction. Our current work on the topic focuses on integrating gaze into social navigation, both to cue nearby pedestrians as to the intended trajectory of the robot and to enable the robot to read the intentions of nearby pedestrians. This paper documents a series of experiments in our laboratory investigating the role of gaze in social navigation.
* Accepted for publication in the Robotics: Science and Systems
Workshop on Social Robot Navigation (RSS 2021)
View paper on