 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIncorporating Data Uncertainty in Object Tracking Algorithms
Paper and Code
Sep 22, 2021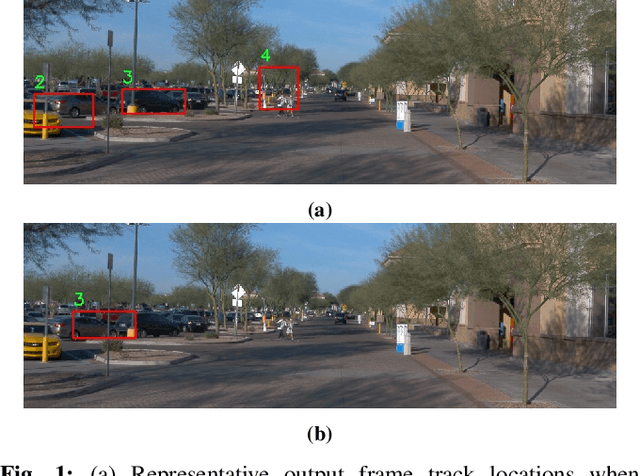
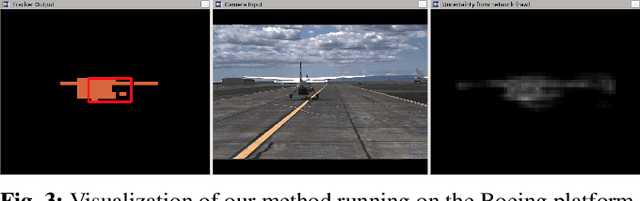
Methodologies for incorporating the uncertainties characteristic of data-driven object detectors into object tracking algorithms are explored. Object tracking methods rely on measurement error models, typically in the form of measurement noise, false positive rates, and missed detection rates. Each of these quantities, in general, can be dependent on object or measurement location. However, for detections generated from neural-network processed camera inputs, these measurement error statistics are not sufficient to represent the primary source of errors, namely a dissimilarity between run-time sensor input and the training data upon which the detector was trained. To this end, we investigate incorporating data uncertainty into object tracking methods such as to improve the ability to track objects, and particularly those which out-of-distribution w.r.t. training data. The proposed methodologies are validated on an object tracking benchmark as well on experiments with a real autonomous aircraft.