 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInclined Quadrotor Landing using Deep Reinforcement Learning
Paper and Code
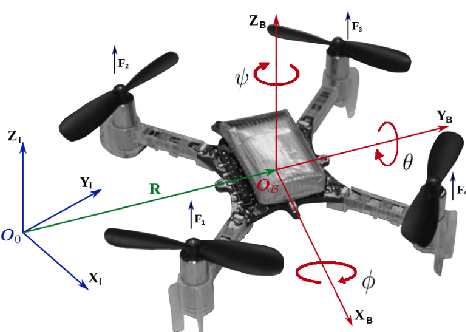
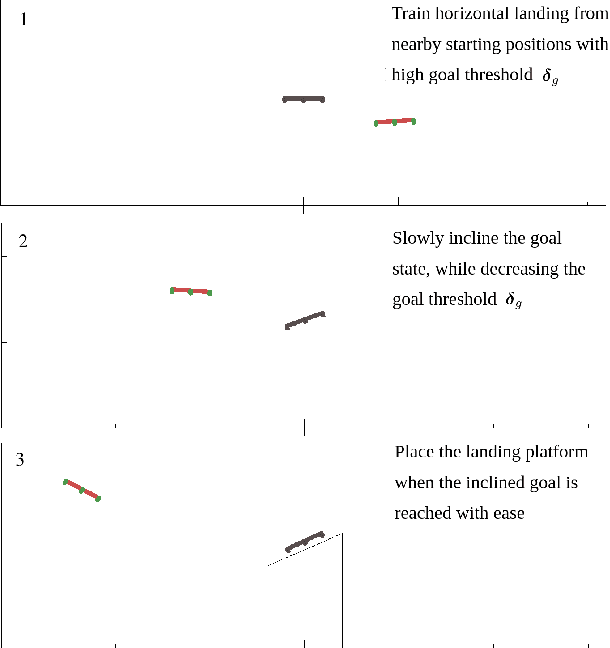
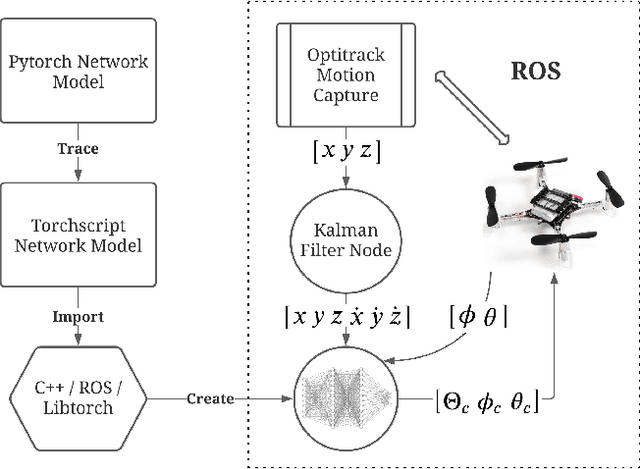
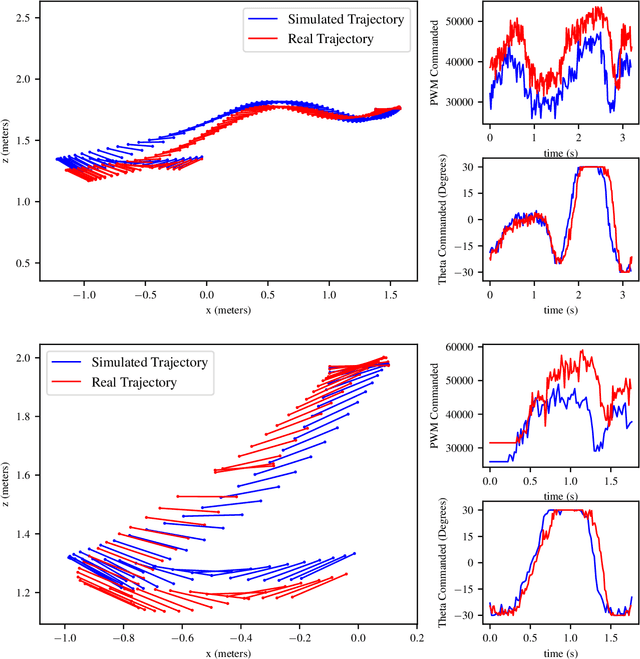
Landing a quadrotor on an inclined surface is a challenging manoeuvre. The final state of any inclined landing trajectory is not an equilibrium, which precludes the use of most conventional control methods. We propose a deep reinforcement learning approach to design an autonomous landing controller for inclined surfaces. Using the proximal policy optimization (PPO) algorithm with sparse rewards and a tailored curriculum learning approach, a robust policy can be trained in simulation in less than 90 minutes on a standard laptop. The policy then directly runs on a real Crazyflie 2.1 quadrotor and successfully performs real inclined landings in a flying arena. A single policy evaluation takes approximately 2.5 ms, which makes it suitable for a future embedded implementation on the quadrotor.