 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInadequate contrast ratio of road markings as an indicator for ADAS failure
Paper and Code
Oct 17, 2024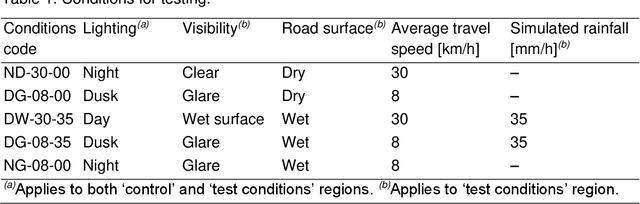
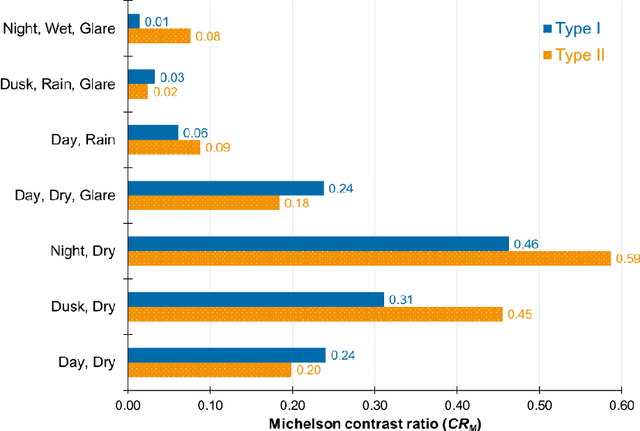
Road markings were reported as critical road safety features, equally needed for both human drivers and for machine vision technologies utilised by advanced driver assistance systems (ADAS) and in driving automation. Visibility of road markings is achieved because of their colour contrasting with the roadway surface. During recent testing of an open-source camera-based ADAS under several visibility conditions (day, night, rain, glare), significant failures in trajectory planning were recorded and quantified. Consistently, better ADAS reliability under poor visibility conditions was achieved with Type II road markings (i.e. structured markings, facilitating moisture drainage) as compared to Type I road marking (i.e. flat lines). To further understand these failures, analysis of contrast ratio of road markings, which the tested ADAS was detecting for traffic lane recognition, was performed. The highest contrast ratio (greater than 0.5, calculated per Michelson equation) was measured at night in the absence of confounding factors, with statistically significant difference of 0.1 in favour of Type II road markings over Type I. Under daylight conditions, contrast ratio was reduced, with slightly higher values measured with Type I. The presence of rain or wet roads caused the deterioration of the contrast ratio, with Type II road markings exhibiting significantly higher contrast ratio than Type I, even though the values were low (less than 0.1). These findings matched the output of the ADAS related to traffic lane detection and underlined the importance of road marking visibility. Inadequate lane recognition by ADAS was associated with very low contrast ratio of road markings indeed. Importantly, specific minimum contrast ratio value could not be found, which was due to the complexity of ADAS algorithms...