 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIn-hand Sliding Regrasp with Spring-Sliding Compliance
Paper and Code
Sep 22, 2019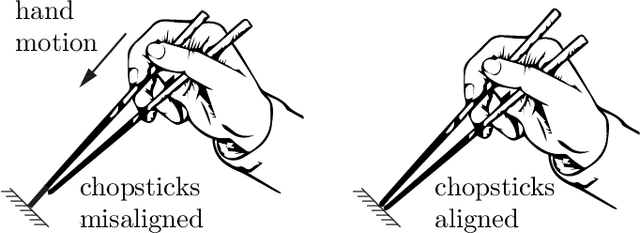
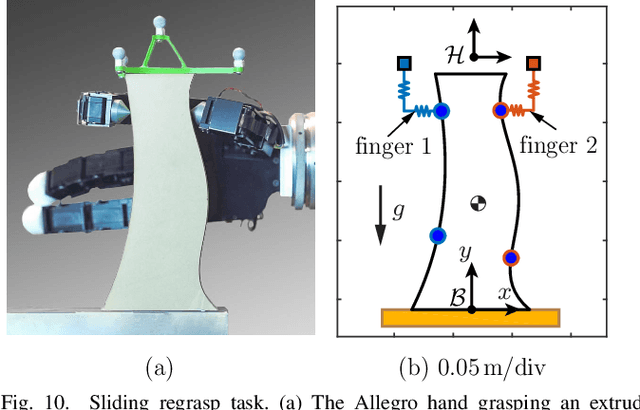
We investigate in-hand regrasping by pushing an object against an external constraint and allowing sliding at the fingertips. Each fingertip is modeled as attached to a multidimensional spring mounted to a position-controlled anchor. Spring compliance maps contact forces to spring compressions, ensuring the fingers remain in contact, and sliding "compliance" governs the relationship between sliding motions and tangential contact forces. A spring-sliding compliant regrasp is achieved by controlling the finger anchor motions. We derive the fingertip sliding mechanics for multifingered sliding regrasps and analyze robust regrasping conditions in the presence of finger contact wrench uncertainties. The results are verified in simulation and experiment with a two-fingered sliding regrasp designed to maximize robustness of the operation.