 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIn-Field Peduncle Detection of Sweet Peppers for Robotic Harvesting: a comparative study
Paper and Code
Sep 29, 2017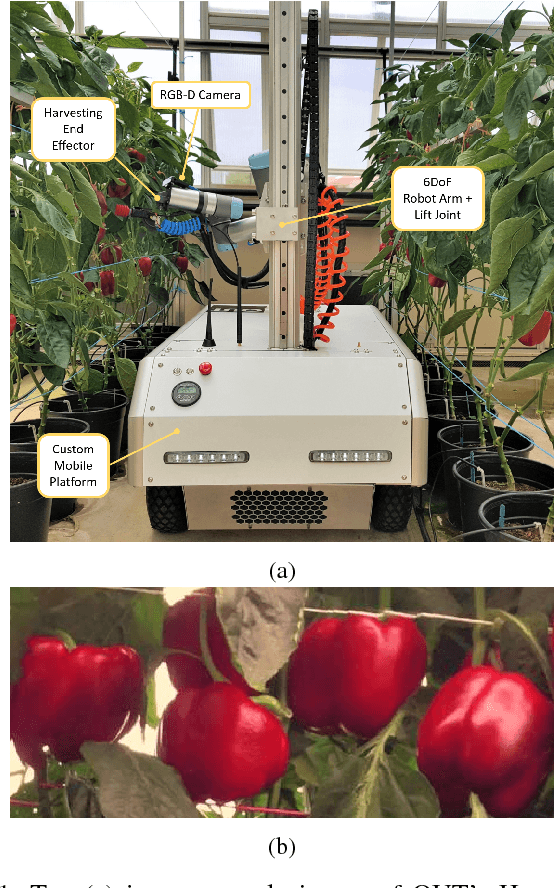

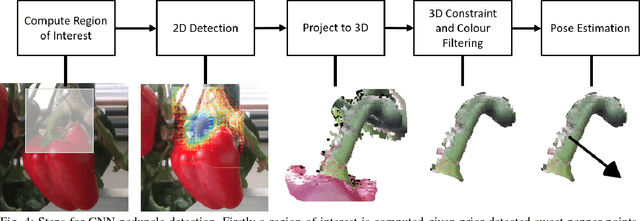
Robotic harvesting of crops has the potential to disrupt current agricultural practices. A key element to enabling robotic harvesting is to safely remove the crop from the plant which often involves locating and cutting the peduncle, the part of the crop that attaches it to the main stem of the plant. In this paper we present a comparative study of two methods for performing peduncle detection. The first method is based on classic colour and geometric features obtained from the scene with a support vector machine classifier, referred to as PFH-SVM. The second method is an efficient deep neural network approach, MiniInception, that is able to be deployed on a robotic platform. In both cases we employ a secondary filtering process that enforces reasonable assumptions about the crop structure, such as the proximity of the peduncle to the crop. Our tests are conducted on Harvey, a sweet pepper harvesting robot, and is evaluated in a greenhouse using two varieties of sweet pepper, Ducati and Mercuno. We demonstrate that the MiniInception method achieves impressive accuracy and considerably outperforms the PFH-SVM approach achieving an F1 score of 0.564 and 0.302 respectively.