 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproving Self-Consistency in Underwater Mapping through Laser-Based Loop Closure (Extended)
Paper and Code
Jan 05, 2023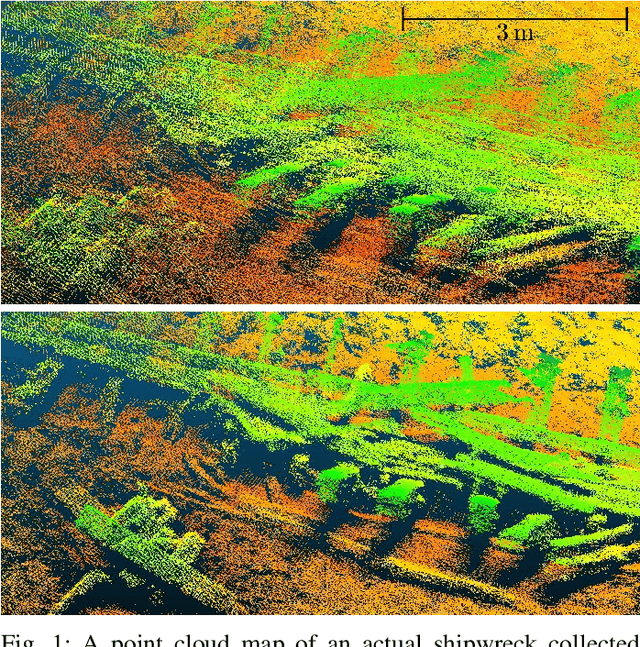
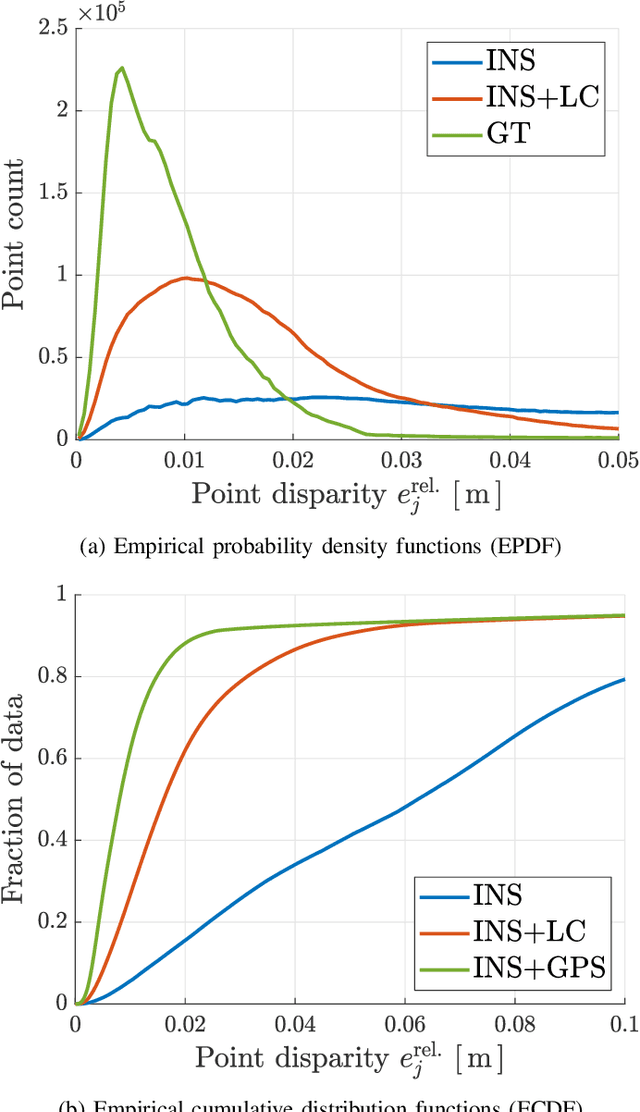
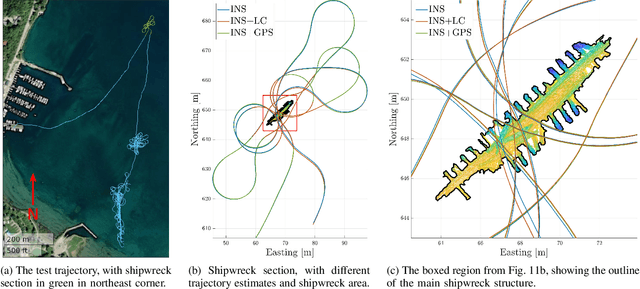
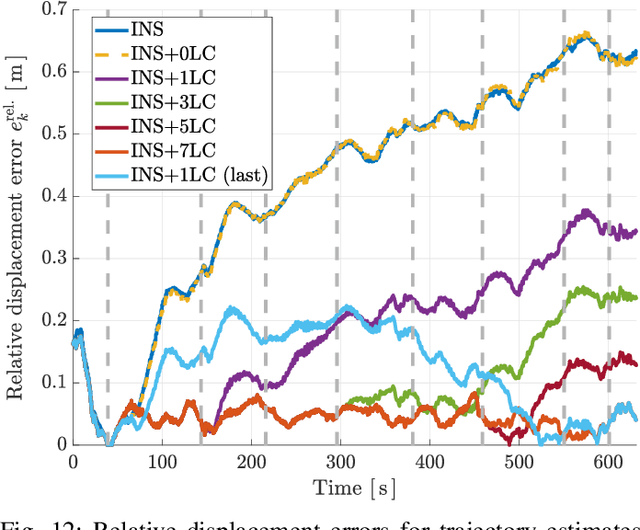
Accurate, self-consistent bathymetric maps are needed to monitor changes in subsea environments and infrastructure. These maps are increasingly collected by underwater vehicles, and mapping requires an accurate vehicle navigation solution. Commercial off-the-shelf (COTS) navigation solutions for underwater vehicles often rely on external acoustic sensors for localization, however survey-grade acoustic sensors are expensive to deploy and limit the range of the vehicle. Techniques from the field of simultaneous localization and mapping, particularly loop closures, can improve the quality of the navigation solution over dead-reckoning, but are difficult to integrate into COTS navigation systems. This work presents a method to improve the self-consistency of bathymetric maps by smoothly integrating loop-closure measurements into the state estimate produced by a commercial subsea navigation system. Integration is done using a white-noise-on-acceleration motion prior, without access to raw sensor measurements or proprietary models. Improvements in map self-consistency are shown for both simulated and experimental datasets, including a 3D scan of an underwater shipwreck in Wiarton, Ontario, Canada.